CTCUI SMD 全自動智慧檢測系統:WiseTechVision 在 QC 自動化的應用
整合視覺定位、多面 AOI 檢測與 All-in-One 自動化流程

前言
在電子製造業,SMD(Surface Mount Device)元件的品質檢測是生產流程中的關鍵環節。傳統檢測方式依賴人工目視或單點設備檢測,不僅效率低落,也容易因人為因素產生誤判。
本文介紹我們開發的 CTCUI SMD 全自動智慧檢測系統,採用雙機器人協同作業,整合了雷刻、壓測、電測、AOI、包裝等完整流程,並在關鍵環節應用 WiseTechVision 視覺技術,實現:
- LDRobot + Eye-in-Hand:Tube 輸送帶入料視覺定位與自動補正
- UDRobot + Eye-in-Hand:4 面 10 種以上 AOI 光學缺陷檢測
- Socket 更換後視覺重新定位(快速換線)
專案時程
- 開發時間:2022 年 11 月 - 2023 年 6 月
- 系統整合:卓智機器人 Wise Tech Robot
- 首次測試:2023 年 6 月
- 持續優化:2023 - 2024 年
系統展示影片

▲ 點擊播放:SMD 雷刻、壓測、電測、AOI、包裝 All in One System
更多展示影片:
系統架構
完整流程
雙機器人協同作業:
┌─────────────────────────────────────────────────────────────┐
│ LDRobot(上料機器人 + Eye-in-Hand) │
│ Tube輸送帶入料 → Eye-in-Hand定位 → 雷刻 → 壓測 → 放電測站 │
│ ↓ │
│ 手臂帶相機移動 │
│ WiseTech Vision │
│ 入料定位、自動對位補正 │
└─────────────────────────────────────────────────────────────┘
↓
電測站(2台電測系統)
↓
┌─────────────────────────────────────────────────────────────┐
│ UDRobot(檢測機器人) │
│ 電測上方拍頂部 → 抓取 → AOI站翻轉檢測 → 包裝 │
│ ↓ ↓ │
│ WiseTech Vision 3面AOI檢測 │
│ 頂部檢測 (側1、底、側2) │
└─────────────────────────────────────────────────────────────┘
硬體組成
| 元件 | 規格/數量 |
|---|---|
| 機器手臂 | KUKA KR4 R600 × 2(LDRobot、UDRobot) |
| 控制器 | KR C4 Controller × 2 |
| 視覺系統 | 3 台 IDS 工業相機 + WiseTechVision |
| - LDCamera:Eye-in-Hand(固定在 LDRobot 手臂上)入料定位 | |
| - UDCamera:Eye-in-Hand(固定在 UDRobot 手臂上)電測站頂部 AOI | |
| - StationCamera:固定式,AOI 站 3 面檢測(側1、底、側2) | |
| 光源系統 | 1 台調光器 + 多組光源模組 |
| 雷刻系統 | 雷射雕刻機(含 Marking Mate) |
| 電性測試 | 耐壓測試系統 × 1、電性測試系統 × 2 |
| 檢測模組 | AOI 系統(含光源模組) |
| 其他模組 | Socket 模組、扣壓模組、包裝機 |
軟體架構
┌─────────────────────────┐
│ CTCUI │ ← 中控系統
│ (主控制介面) │
└──────────┬──────────────┘
│
├─→ ┌─────────────────────┐
│ │ AOIUI │ ← AOI 檢測系統
│ │ (WiseTechVision) │
│ └─────────────────────┘
│
├─→ ┌─────────────────────┐
│ │ Robot Control │ ← KUKA 機器手臂控制
│ └─────────────────────┘
│
├─→ ┌─────────────────────┐
│ │ ATE Systems │ ← 電測/壓測系統
│ └─────────────────────┘
│
└─→ ┌─────────────────────┐
│ Laser/Packer │ ← 雷刻/包裝系統
└─────────────────────┘
WiseTechVision 在 QC 自動化的三大應用
1. Tube 入料視覺定位與尺寸檢測(Eye-in-Hand)
挑戰:
- SMD 元件從 Tube 倒出到輸送帶,位置與角度不固定
- 需要精確定位並同時檢測尺寸,篩選不良品
- 需要在入料階段就過濾掉尺寸 NG 與角度錯誤的元件
WiseTechVision 解決方案:
┌─────────────────────────────────────────────┐
│ Tube 供料管倒出 SMD │
│ │
│ [SMD] [SMD] [SMD] ... → 輸送帶 │
└──────────────────────┬──────────────────────┘
↓
輸送帶運行
↓
┌─────────────────┐
│ 感測器偵測在席 │
│ (Present) │
└────────┬────────┘
↓
┌─────────────────┐
│ 靠齊裝置 │
│ (Aligner) │
│ 將SMD推至定位 │
└────────┬────────┘
↓
確認對齊完成 (IsAligned)
↓
┌─────────────────┐
│ LDRobot │
│ 帶著 IDS 相機 │
│ (Eye-in-Hand) │
│ 移動至SMD上方 │
└────────┬────────┘
↓
相機拍照辨識
↓
┌─────────────────────┐
│ WiseTechVision │
│ - 輪廓檢測 │
│ - 位置計算 │
│ - 角度偵測 │
└──────────┬──────────┘
↓
座標補正 (ΔX, ΔY, Δθ)
↓
機器手臂精確夾取
技術要點:
- Eye-in-Hand 配置:相機固定在 LDRobot 手臂上
- 即時影像擷取與處理
- 輪廓辨識與中心點計算
- 旋轉角度偵測與補正
- 尺寸量測:同時測量 SMD 長度(Length)與寬度(Width)
- NG 判定:尺寸超出公差或角度異常自動判 NG
- 手眼座標轉換至機器手臂坐標系
實作流程(含 QC 檢測):
- Tube 倒出 SMD 元件到輸送帶
- 輸送帶運行,感測器偵測元件在席
- 靠齊裝置(Aligner)動作,將 SMD 推至定位
- 確認對齊完成
- LDRobot 帶著相機移動到 SMD 上方
- IDS 相機拍照,WiseTechVision 處理:
- 辨識位置與角度
- 量測尺寸(Length、Width)
- 判定是否 NG
- OK:計算補正量,機器手臂夾取後送往雷刻
- NG:標記 NG 類型(SizeNG 或 WrongAngle),機器手臂夾取後放入 入料 NG 盤
- 入料計數 +1
2. Socket 更換視覺定位
挑戰:
- 產品更換時需更換 Socket(電測/壓測座)
- Socket 更換後位置會有微小偏差
- 傳統方式需人工示教,耗時且精度不穩定
WiseTechVision 解決方案:
產品切換
↓
更換 Socket
↓
WiseTechVision 自動掃描
↓
辨識 Socket 特徵點
↓
計算新座標
↓
自動更新機器手臂路徑
技術優勢:
- 自動化:無需人工示教,換線時間大幅縮短
- 高精度:視覺定位誤差小於人工示教
- 可重現:每次更換 Socket 都能精確定位
- 彈性化:支援不同產品快速切換
實作步驟:
- 操作人員更換對應產品的 Socket
- 執行視覺掃描程序
- WiseTechVision 辨識 Socket 特徵點(定位孔、邊緣等)
- 計算 Socket 中心座標與角度
- 系統自動更新測試路徑座標
- 完成,可開始生產
3. 4 面 AOI 光學缺陷檢測
檢測站點:
| 檢測站 | 機器人 | 檢測面 | 檢測項目 |
|---|---|---|---|
| 電測站 Top | UDRobot | 頂部 | 破損、刮傷、印字檢測 |
| 備註:2 台電測系統,每個 SMD 經過其中 1 台 | |||
| AOI 站 Side1 | UDRobot | 側面 1 | Pin 腳共平面、破損、刮傷 |
| AOI 站 Bottom | UDRobot | 底部 | 歪斜、破損、刮傷、印字 |
| AOI 站 Side2 | UDRobot | 側面 2 | Pin 腳共平面、破損、刮傷 |
工作流程:
- LDRobot:負責入料定位、雷刻、壓測,最後將 SMD 放入電測站
- UDRobot:在電測站拍攝頂部 AOI,抓取後送到 AOI 站翻轉檢測 3 面(側1、底、側2),最後放入包裝機
10 種以上缺陷檢測:
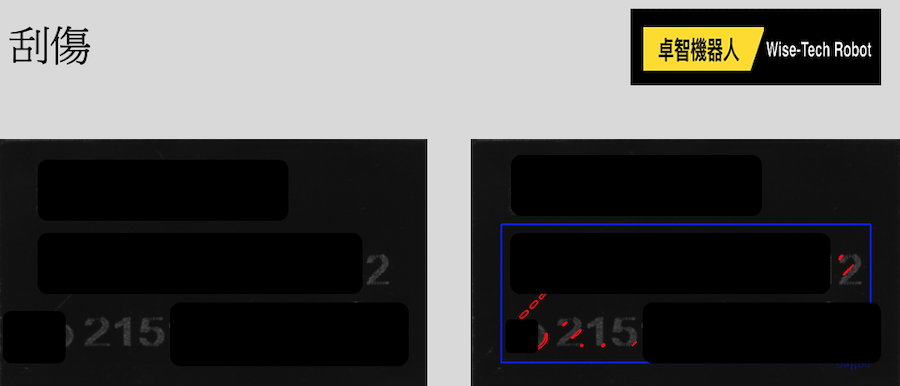
- 刮傷檢測(Scratch)
- 檢測表面刮痕
- 區分正常加工痕跡與異常刮傷
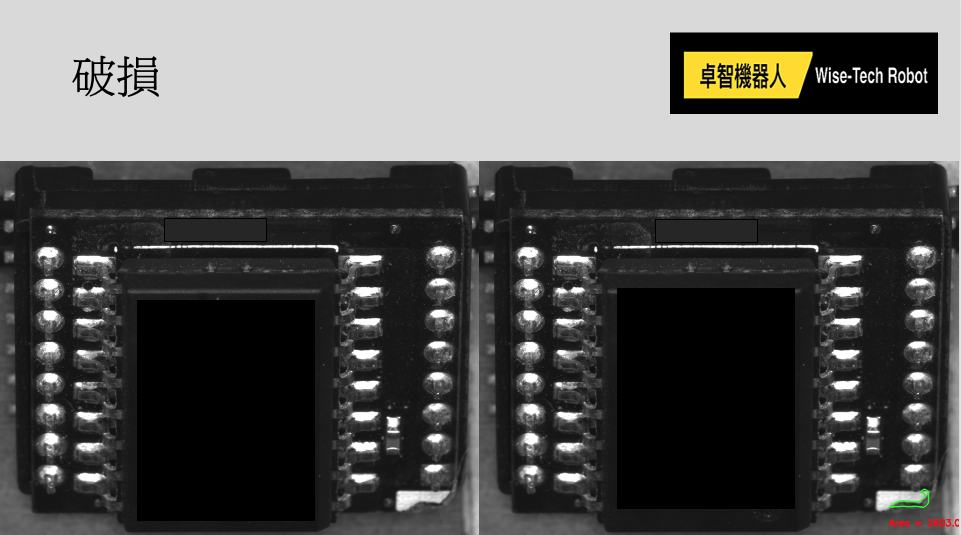
- 破損檢測(Broken)
- Pin 腳斷裂檢測
- 本體破損檢測
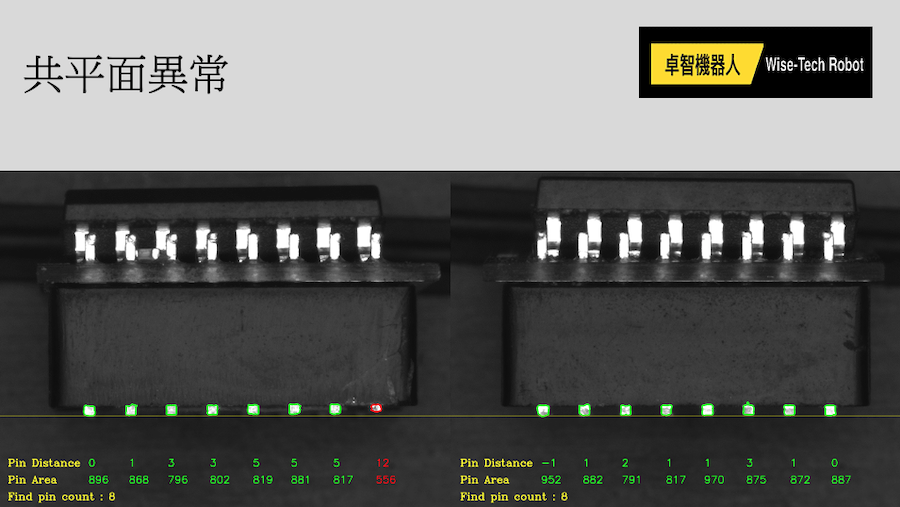
- 共平面度檢測(Coplanarity)
- Pin 腳共平面偏差檢測
- 確保焊接品質
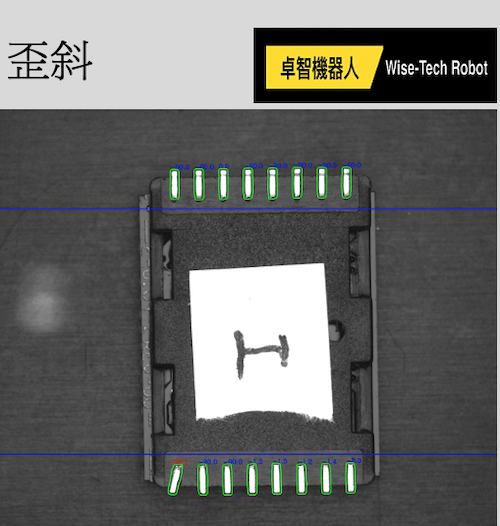
- 歪斜檢測(Skew)
- 元件角度偏移檢測
- 印字歪斜檢測
- 印字檢測(Marking)
- 雷刻印字清晰度
- 印字位置偏移
- 印字內容正確性
- 尺寸檢測(Dimension)
- 長寬高尺寸檢測
- 公差範圍判定
- Pin 腳檢測(Pin Inspection)
- Pin 腳數量
- Pin 腳間距
- Pin 腳變形
- 表面污染檢測
- 表面異物
- 污漬檢測
- 顏色異常檢測
- 氧化變色
- 材料異常
- 其他缺陷
- 毛邊、翹曲等
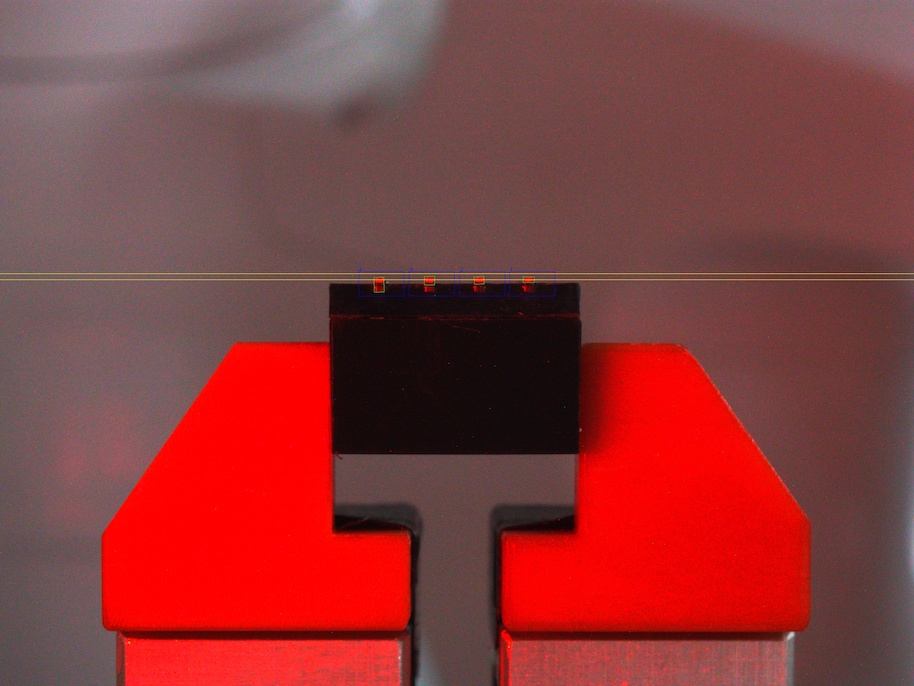
Pin 腳檢測影像:
 |
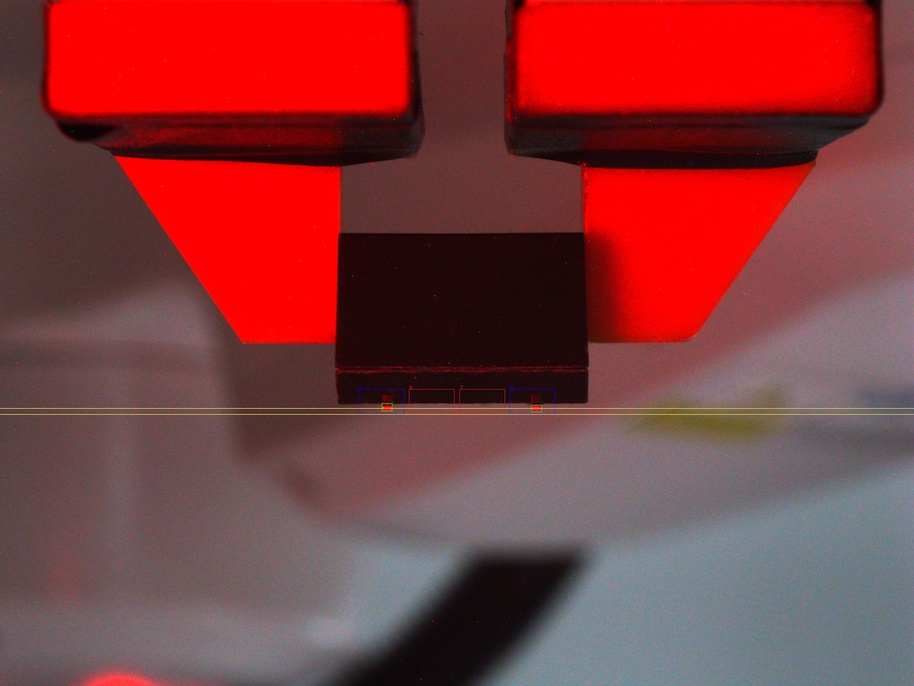 |
| Side 1 Pin 腳檢測 | Side 2 Pin 腳檢測 |
核心技術:AOIUI 系統
系統架構
AOIServer 核心:
// 3 台 IDS 工業相機統一管理
// SmartCamera 類別封裝 IDS 工業相機(SmartCameraIDS)
public SmartCamera? LDCamera; // LD Robot Eye-in-Hand 入料定位相機
public SmartCamera? UDCamera; // UD Robot Eye-in-Hand 電測站頂部 AOI 相機
public SmartCamera? StationCamera; // AOI 站固定式 3 面檢測相機
// 檢測事件
- VTCheckPoint // LDRobot 視覺定位檢測點(入料)
- FTCheckPoint // LDRobot 治具定位檢測點
- PositionSize // LDRobot 位置與尺寸檢測
- Top1/Top2 // UDRobot 電測站頂部 AOI(2 台電測)
- Side1/Side2 // UDRobot AOI 站側面共平面、破損、刮傷
- Bottom // UDRobot AOI 站底部歪斜、破損、刮傷
IDS 工業相機特性:
- IDS peak SDK 整合
- 可程式化 Gain、ExposureTime、FrameRate 控制
- 高速影像擷取(支援即時檢測)
- 色彩校正模式(ColorCorrectionMode)
- 多相機同步管理
WiseTechVision 模組:
- 輪廓檢測(Contour Detection)
- 特徵匹配(Feature Matching)
- 多通道影像處理(Channels)
- Pattern 模板比對
檢測流程
元件進入檢測站
↓
觸發檢測事件
↓
IDS 工業相機拍照
↓
WiseTechVision 影像處理
↓
缺陷辨識與判定
↓
回傳檢測結果 (OK/NG + 缺陷類型)
↓
機器手臂依結果分流
(OK → 下一站, NG → NG 盤)
NG 分類與品質追溯系統
NG 盤分類
系統設置兩種 NG 盤,依 NG 發生階段分別收集:
| NG 盤 | 用途 | NG 類型 |
|---|---|---|
| 入料 NG 盤 | 入料階段檢出的不良品 | - SizeNG(尺寸超出公差) - WrongAngle(角度錯誤/反向) |
| 電測/AOI NG 盤 | 後段檢測出的不良品 | - VT/FT NG(壓測/電測失敗) - 頂部 AOI NG - 側面 AOI NG - 底部 AOI NG - Empty/Timeout |
完整 NG 類型標記
系統對每個 NG 元件進行詳細分類標記(共 20+ 種 NG 類型):
入料檢測 NG:
SizeNG:尺寸超出公差WrongAngle:角度錯誤(入料反向)
壓測/電測 NG:
VTNG:耐壓測試失敗FT1NG/FT2NG:電性測試失敗Empty:元件不在位置(碰到負極限)Timeout:設備逾時或錯誤
頂部 AOI NG:
TopNoLaser:未檢測到雷刻字TopScratched:頂部刮傷TopWordShift:印字偏移
側面 AOI NG(Side 1 & Side 2):
Side1LostPin/Side2LostPin:缺 PinSide1Coplanarity/Side2Coplanarity:共平面度不良Side1Scratched/Side2Scratched:側面刮傷
底部 AOI NG:
BottomLength:Pin 腳長度異常BottomAngle:Pin 腳角度偏移BottomLostPin:底部缺 PinBottomScratched:底部刮傷
品質追溯資訊
每個 SMD 元件從入料到包裝,系統完整記錄:
public class SMD
{
public string GUID; // 唯一識別碼
public DateTime StartTime; // 入料時間
public SMDLocationType Location; // 當前位置
public SMDProcessingStageType Stage; // 處理階段
public SMDNGType NGType; // NG 類型
public Dictionary<string, string> Data; // 檢測數據
// - Length, Width (尺寸)
// - 各站 AOI 檢測結果
// - 壓測/電測數據
}
追溯能力:
- 完整記錄每個元件的檢測歷程
- NG 元件可追溯至具體 NG 原因與檢測數據
- 支援生產統計與品質分析
- NG 盤清理時可統計各類 NG 數量
系統特色
1. 雙機器人協同作業
工作分工明確:
LDRobot(上料機器人 + Eye-in-Hand 視覺):
- Tube 輸送帶入料 + Eye-in-Hand 視覺定位
- 雷射雕刻(Marking)
- 耐壓測試
- 將 SMD 放入電測座
UDRobot(檢測機器人):
- 電測站頂部 AOI 檢測
- AOI 站翻轉檢測(側1、底、側2)
- Tape Reel 自動包裝
協同作業優勢:
- 平行作業,提升產能
- 分工專業化,提高精度
- 降低單一機器人負載
- 縮短作業週期時間
2. All-in-One 整合
完整流程自動化:
- Tube 輸送帶自動入料(Eye-in-Hand 視覺定位)
- 雷射雕刻(Marking)
- 耐壓測試
- 電性測試(2 套系統)
- 4 面 AOI 檢測(Eye-in-Hand + 固定式相機)
- Tape Reel 自動包裝
優勢:
- 單一系統完成所有檢測
- 減少人工搬運與等待
- 降低汙染與損壞風險
- 提升整體效率
3. 視覺自動對位補正
傳統方式 vs. 視覺對位:
| 項目 | 傳統治具定位 | WiseTechVision 視覺對位 |
|---|---|---|
| 換線時間 | 需重新示教,耗時 2-4 小時 | 自動掃描,10-15 分鐘 |
| 精度 | 受人工操作影響 | 高精度,可重現 |
| 彈性 | 需製作專用治具 | 軟體參數調整即可 |
| Socket 更換 | 人工重新示教 | 視覺自動定位 |
| 維護成本 | 治具磨損需更換 | 無耗材 |
關鍵技術:
- AOI 自動對位(入料、Socket 定位)
- 即時座標補正
- 多點校正提升精度
4. 高穩定性與可靠性
2024 年 4 月 3 日 花蓮地震驗證:
台灣花蓮近海發生規模 7.2 地震,高雄震度 3-4 級,是自 921 大地震之後最大的地震規模。本系統在地震後當日測試均可正常運作,無任何受損。
系統使用 AOI 自動校正 執行機器手臂各個位置的運動控制位置補償,因此不需要任何額外校正處理,顯見系統耐震能力高且非常穩定、可靠!
穩定性設計:
- 視覺自動補正,無需震後重新校正
- 即時位置補償
- 異常檢測與處理機制
- Timeout 流程保護
技術實作細節
1. 入料定位與尺寸檢測流程(Eye-in-Hand)
// 入料定位與尺寸檢測事件處理
ReqPositionSize?.Invoke(this, requestEventArgs);
// 流程:
1. Tube 倒出 SMD 元件到輸送帶
2. 輸送帶運行(ConveyorRun)
3. 感測器偵測到元件在席(Present)
4. 靠齊裝置動作(Aligner),將 SMD 推至定位
5. 確認對齊完成(IsAligned)
6. LDRobot 帶著 IDS 相機移動到 SMD 上方
7. 觸發視覺檢測(Eye-in-Hand 相機拍照)
8. WiseTechVision 處理影像:
- Position():輪廓檢測,計算位置與角度
- 量測尺寸:PositionLength、PositionWidth
- 尺寸公差判定:超出範圍拋出 SizeNGException
- 角度判定:異常角度拋出 WrongAngleException
9. 【OK 流程】
- 計算補正量 (ΔX, ΔY, Δθ)
- 回傳:OKOffset(PositionSize, frame, Length, Width)
- 機器手臂微調位置後精確夾取
- 送往雷刻站
10. 【NG 流程】
- 標記 NG 類型(SizeNG 或 WrongAngle)
- 回傳:NGOffset(PositionSize, frame, NGType, Length, Width)
- 機器手臂夾取
- 放入入料 NG 盤(SizeVTNGTray)
11. 入料計數 +1,記錄檢測數據
2. AOI 檢測流程
// UDRobot 多面 AOI 檢測事件
ReqTop1?.Invoke(this, requestEventArgs); // 電測站 1 頂部
ReqTop2?.Invoke(this, requestEventArgs); // 電測站 2 頂部
ReqSide1?.Invoke(this, requestEventArgs); // AOI 站側面 1
ReqSide2?.Invoke(this, requestEventArgs); // AOI 站側面 2
ReqBottom?.Invoke(this, requestEventArgs); // AOI 站底部
// 檢測流程:
1. 【電測站頂部檢測 - Eye-in-Hand】
- SMD 在電測座上
- UDRobot 帶著 IDS 相機移動到 SMD 上方(Eye-in-Hand)
- UDCamera 拍照
- WiseTechVision 檢測頂部破損、刮傷、印字
- UDRobot 抓取 SMD
2. 【AOI 站翻轉檢測 - 固定式相機】
- UDRobot 將 SMD 送到 AOI 站
- 固定式 StationCamera 檢測 3 面:
a. 側面 1:Pin 腳共平面、破損、刮傷
b. 底部:歪斜、破損、刮傷、印字
c. 側面 2:Pin 腳共平面、破損、刮傷
3. 【每次檢測步驟】
- 調整光源(LightController)
- IDS 工業相機擷取影像(Eye-in-Hand 或固定式)
- WiseTechVision 影像處理(輪廓檢測、特徵匹配、缺陷辨識)
- 判定 OK/NG + 缺陷類型
- 回傳結果並記錄 Log
3. Socket 定位流程
// 產品切換時
1. 操作人員更換 Socket
2. 執行 Socket 掃描程序
3. WiseTechVision 辨識 Socket 特徵
- 定位孔
- 邊緣輪廓
- 關鍵特徵點
4. 計算新座標 Offset
5. 更新產品配置 (Product.UserOffsetParameter.LDFT1/LDFT2)
6. 儲存至 SystemData
7. 機器人自動套用新的 Offset
8. 完成,可開始生產
系統效益
品質提升
| 檢測項目 | 人工檢測 | CTCUI 自動檢測 |
|---|---|---|
| 檢出率 | 85-90%(受疲勞影響) | 95%+(穩定) |
| 誤判率 | 5-10% | < 2% |
| 檢測速度 | 3-5 秒/件 | 1-2 秒/件 |
| 一致性 | 因人而異 | 標準化 |
| 可追溯性 | 困難 | 完整記錄 |
效率提升
- 換線時間:從 2-4 小時縮短至 10-15 分鐘(視覺自動定位)
- 檢測速度:提升 50%+
- 人力需求:從 3-4 人降至 1 人(監控)
- 24 小時運作:無人化夜間生產
成本效益
- 初期投資:視覺系統 + 機器手臂 + 檢測設備
- 長期效益:
- 減少人力成本
- 降低不良品流出
- 提升客戶滿意度
- 減少治具製作與維護成本
技術挑戰與解決方案
挑戰 1:多面檢測的光源控制
問題:
- 不同檢測面需要不同光源配置
- 反光、陰影影響辨識精度
解決方案:
- 可程式調光器(LightController)
- 每個檢測站獨立光源配置
- 軟體控制光源強度與角度
- 多角度打光減少陰影
挑戰 2:即時性要求
問題:
- 生產線節拍要求快速檢測
- 影像處理耗時影響效率
解決方案:
- 設定適當 ROI(Region of Interest)
- 優化影像處理演算法
- Timeout 機制確保流程不卡死
挑戰 3:不同產品快速切換
問題:
- 不同 SMD 產品尺寸、形狀、檢測標準不同
- 傳統方式換線耗時
解決方案:
- Recipe 管理系統
- 產品參數資料庫(ProductManager)
- 視覺自動定位(無需人工示教)
- 一鍵切換產品配置
// 產品切換
ReqProduct?.Invoke(this, requestEventArgs);
// 系統自動:
1. 載入產品 Recipe
2. 更新檢測參數
3. Socket 視覺定位
4. 調整光源配置
5. 完成,可生產
技術資源
CTCUI 系統
WiseTechVision 相關專案
- 散亂螺絲自動整列 - 動態追蹤應用
- 機器手臂同步追蹤工件 - ConveyTech 應用
技術文件
結語
CTCUI SMD 全自動智慧檢測系統展示了 WiseTechVision 在品質檢測自動化領域的強大應用能力。
核心價值
- 雙機器人協同作業
- LDRobot 專注上料與前段加工
- UDRobot 專注檢測與包裝
- 平行作業提升產能與效率
- Eye-in-Hand 視覺定位技術
- Tube 輸送帶入料自動定位(LDRobot + Eye-in-Hand)
- 電測站頂部 AOI 檢測(UDRobot + Eye-in-Hand)
- Socket 更換視覺重新定位
- 大幅縮短換線時間,提升彈性
- 全方位 QC 檢測與追溯
- 入料階段:尺寸檢測 + 角度判定(LDRobot)
- 4 面 AOI:20+ 種缺陷檢測(UDRobot)
- 完整 NG 分類標記與品質追溯
- 高檢出率、低誤判率
- All-in-One 整合
- 從入料到包裝完整自動化
- 單一系統完成所有檢測
- 2 種 NG 盤分類收集不良品
- 提升整體效率與品質
技術突破
- 雙機器人協同:創新的工作分工設計,提升系統產能與可靠性
- Eye-in-Hand 視覺配置:雙機器人均採用手眼配置,靈活適應不同工站
- IDS 工業相機應用:整合 IDS peak SDK,實現高速、高精度影像檢測
- 視覺自動對位:取代傳統治具與人工示教,大幅提升彈性
- 系統整合能力:成功整合雙機器人、多套測試設備與 3 台視覺相機
應用展望
這套系統的技術可延伸應用至:
- 其他電子元件檢測
- 精密零件品質檢測
- 多工序自動化整合
- 智慧製造與工業 4.0
專案資訊
- 系統開發:Yaze Lin
- 系統整合:卓智機器人 Wise Tech Robot
- 開發時程:2022.11 - 2023.06
- 專案連結:GitHub - CTCUI(Private)