自動化專案實作加分題
- 影片簡報
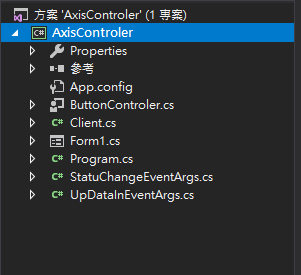
電腦 Client 端程式
- 使用者介面
-
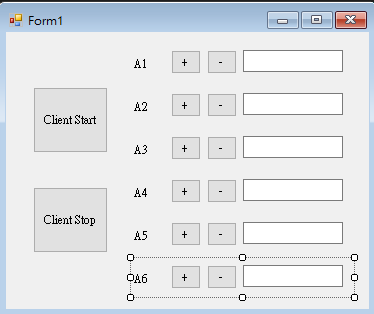
- 使用者控制項 ButtonControler - 點選專案AxisControler右鍵 > 加入 > 新增項目 > 使用者控制向 更名為 ButtonControler

- 加入屬性
- AxisID
- CurrentPosition
- 註冊事件
- 加入屬性
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Drawing;
using System.Data;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
namespace AxisControler
{
public partial class ButtonControler : UserControl
{
public event EventHandler AddButtonClick;
public event EventHandler DelButtonClick; //burron click event
public string CurrentPosition{ get { return txtAxis.Text; } set { txtAxis.Text = value; } } //record the current position
private int axisID = 0;
public int AxisID { get { return axisID; } set { axisID = value; labAxis.Text = "A" + value; } } //set axis in controler
public ButtonControler()
{
InitializeComponent();
}
private void button1_Click(object sender, EventArgs e)
{
AddButtonClick?.Invoke(this, e); //Trigger AddButtonClick event
}
private void button2_Click(object sender, EventArgs e)
{
DelButtonClick?.Invoke(this, e); //Trigger DelButtonClick event
}
}
}
- Form1 程式
- 註冊事件
- 事件出發後 顯示位置訊息、控制項的開關
- 處理跨執行續問題
- 設定Xml格式動作指令
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
namespace AxisControler
{
public partial class Form1 : Form
{
List<ButtonControler> controlers = new List<ButtonControler>();
ClientExample client = new ClientExample();
private string distancePositive = "10";
private string distanceNegative = "-10";
public Form1()
{
InitializeComponent();
client.UpDataIn += Client_UpData;
client.SatatusChanged += Client_StatusChanged;
controlers.AddRange(new List<ButtonControler>() { buttonControler1, buttonControler2, buttonControler3, buttonControler4, buttonControler5, buttonControler6 });
foreach (var item in controlers)
{
item.AddButtonClick += AxisControler1_OnAddButtonClick;
item.DelButtonClick += AxisControler1_OnDelButtonClick;
}
}
private void Client_StatusChanged(object sender, StatuChangeEventArgs e)
{
UIThread(this, () =>
{
foreach (var item in controlers)
{
item.Enabled = e.idle; //if robot idle, close button
}
});
}
private void AxisControler1_OnDelButtonClick(object sender, EventArgs e)
{
var axis = (sender as ButtonControler).AxisID;
var dataSend = "<Distance><Axis Angle =\"" + distanceNegative + "\">" + axis + "</Axis></Distance>";
client.Send(dataSend);
}
private void AxisControler1_OnAddButtonClick(object sender, EventArgs e)
{
var axis = (sender as ButtonControler).AxisID;
var dataSend = "<Distance><Axis Angle =\"" + distancePositive + "\">" + axis + "</Axis></Distance>";
client.Send(dataSend);
}
private void Client_UpData(object sender, UpDataInEventArgs e)
{
UIThread(this, () =>
{
buttonControler1.CurrentPosition = e.A1.ToString();
buttonControler2.CurrentPosition = e.A2.ToString();
buttonControler3.CurrentPosition = e.A3.ToString();
buttonControler4.CurrentPosition = e.A4.ToString();
buttonControler5.CurrentPosition = e.A5.ToString();
buttonControler6.CurrentPosition = e.A6.ToString();
});
}
private static void UIThread(Control control, Action code)
{
if (control.InvokeRequired) //call otehr threads
{
control.BeginInvoke(code);
}
else
{
code.Invoke();
}
}
private void ClientStart_Click(object sender, EventArgs e)
{
client.Start("192.168.1.147", 54600);
}
private void ClientStop_Click(object sender, EventArgs e)
{
client.Stop();
}
}
}
- 類別 Client
- 傳送動作指令
- 接收位置訊息
- 取出Xml內容
- 加入事件並且觸發
using System;
using System.IO;
using System.Net.Sockets;
using System.Threading;
using System.Threading.Tasks;
using System.Xml;
namespace AxisControler
{
class ClientExample
{
TcpClient myClient; //建立TcpClient
public event EventHandler<UpDataInEventArgs> UpDataIn;
public event EventHandler<StatuChangeEventArgs> SatatusChanged;
private string sendData = string.Empty;
private bool idle;
private bool beforeIdle = false;
public ClientExample() { }
public void Start(string ip, int port)
{
if (myClient != null)
{
return;
}
myClient = new TcpClient(ip, port);
Task.Run(() => ClientService()); //task run in other thread
}
public void Send(string data)
{
sendData = data;
}
private void ClientService()
{
while (true)
{
try
{
if (myClient != null) //mtClient has entity
{
StreamReader streamReader = new StreamReader(myClient.GetStream());
StreamWriter streamWriter = new StreamWriter(myClient.GetStream());
while (myClient.Connected)
{
if (sendData != string.Empty)
{
streamWriter.WriteLine(sendData);
streamWriter.Flush(); //send "sendData"
Console.WriteLine("Client To Server : " + sendData);
var data = streamReader.ReadLine(); //read "Confirm"
Console.WriteLine("From Server : " + data);
sendData = string.Empty;
}
var dataPosition = streamReader.ReadLine(); //read position and idle
Console.WriteLine("From Server : " + dataPosition);
XmlDocument xmlDocument = new XmlDocument();
xmlDocument.LoadXml(dataPosition); //dataPosition set in xmlDocument
var positionA1 = xmlDocument.SelectSingleNode("/Position/A1").InnerText; //take Xml content
var positionA2 = xmlDocument.SelectSingleNode("/Position/A2").InnerText;
var positionA3 = xmlDocument.SelectSingleNode("/Position/A3").InnerText;
var positionA4 = xmlDocument.SelectSingleNode("/Position/A4").InnerText;
var positionA5 = xmlDocument.SelectSingleNode("/Position/A5").InnerText;
var positionA6 = xmlDocument.SelectSingleNode("/Position/A6").InnerText;
var getIdle = xmlDocument.SelectSingleNode("/Position/Idle").InnerText; //access A1 to A6 and idle status
idle = getIdle == "0" ? false : true;
if (idle != beforeIdle) //idle has been changed
{
var statusChangeEventArgs = new StatuChangeEventArgs();
statusChangeEventArgs.idle = idle; //access idle
SatatusChanged?.Invoke(this, statusChangeEventArgs); //trigger event
beforeIdle = idle;
}
var upDataInEventArgs = new UpDataInEventArgs();
upDataInEventArgs.A1 = float.Parse(positionA1);
upDataInEventArgs.A2 = float.Parse(positionA2);
upDataInEventArgs.A3 = float.Parse(positionA3);
upDataInEventArgs.A4 = float.Parse(positionA4);
upDataInEventArgs.A5 = float.Parse(positionA5);
upDataInEventArgs.A6 = float.Parse(positionA6); //access A1 to A6
UpDataIn?.Invoke(this, upDataInEventArgs); //trigger event
SpinWait.SpinUntil(() => { return false; }, 10); //wait 0.001 second
}
}
}
catch (Exception ex) // try has error
{
Console.WriteLine(ex.ToString()); //write error
break;
}
}
}
public void Stop()
{
if (myClient != null)
{
myClient.Close();
myClient = null;
}
}
}
}
- 事件 StatuChangeEventArgs
- 紀錄Idle狀態
using System;
namespace AxisControler
{
public class StatuChangeEventArgs : EventArgs
{
public bool idle;
}
}
- 事件 UpDataInEventArgs
- 紀錄 A1 至 A6 軸位置
using System;
namespace AxisControler
{
internal class UpDataInEventArgs : EventArgs
{
public float A1 = 0;
public float A2 = 0;
public float A3 = 0;
public float A4 = 0;
public float A5 = 0;
public float A6 = 0;
}
}
KUAK 手臂 Server端程式
- Kuka 程式使用到的 Function
-
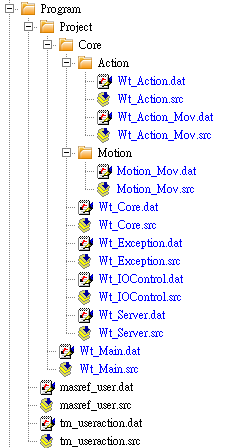
- Core
- 初始化
- 主迴圈判斷Ready
GLOBAL DEF Core ()
BAS(#BASE, 0)
BAS(#TOOL, 1)
IOControl()
Exception()
Server() ;server Init and Start
END
--------------------------------------------------------------------------------------------------------------------
GLOBAL DEF Core_Run()
PTP XHOME
REPEAT
WHILE ( ( NOT Event() ) AND ( NOT Error() ) )
IF Server_Get_Ready() THEN
Action()
ENDIF
ENDWHILE
UNTIL SYS_EXIT
END
- XmlServer設定檔
- 設定連線資料
- 設定傳送及接收資料
<ETHERNETKRL>
<CONFIGURATION>
<EXTERNAL>
<TYPE>Client</TYPE>
</EXTERNAL>
<INTERNAL>
<IP>192.168.1.147</IP>
<PORT>54600</PORT>
<ALIVE Set_Flag="1"/>
</INTERNAL>
</CONFIGURATION>
<RECEIVE>
<XML>
<ELEMENT Tag="Distance/Axis" Type="INT" Set_Flag="2"/>
<ELEMENT Tag="Distance/Axis/@Angle" Type="INT" />
</XML>
</RECEIVE>
<SEND>
<XML>
<ELEMENT Tag="Position/A1" Type="REAL" />
<ELEMENT Tag="Position/A2" Type="REAL" />
<ELEMENT Tag="Position/A3" Type="REAL" />
<ELEMENT Tag="Position/A4" Type="REAL" />
<ELEMENT Tag="Position/A5" Type="REAL" />
<ELEMENT Tag="Position/A6" Type="REAL" />
<ELEMENT Tag="Position/Idle" Type="BOOL" />
</XML>
</SEND>
</ETHERNETKRL>
- Server
- 定義中斷程式
- 連線後 Timer 初始化、開啟
- Timer > 100ms 傳送手臂位置
- 接收資料 設定 Info 、 Idle
- 定義中斷程式
GLOBAL DEF Server ()
GLOBAL INTERRUPT DECL 100 WHEN $TIMER[1] > 100 DO SendData() ;when timer big than 0.1 second,send current position
GLOBAL INTERRUPT DECL 101 WHEN $FLAG[1]==TRUE DO TimerData_InIt();When flag 1 True,timer init
GLOBAL INTERRUPT DECL 102 WHEN $FLAG[2]==TRUE DO Instruction_In();When flag 2 True,recive the instruction
$FLAG[1] = FALSE
$FLAG[2] = FALSE
INTERRUPT ON 100
INTERRUPT ON 101
INTERRUPT ON 102
Server_Set_Ready(FALSE)
ACTION_Set_Idle(TRUE)
Server_Start(1)
END
--------------------------------------------------------------------------------------------------------------------
DEF TimerData_InIt()
$TIMER_STOP[1] = TRUE ;close timer
$TIMER[1]=0 ;timer init
$TIMER_STOP[1] = FALSE ;open timer
END
--------------------------------------------------------------------------------------------------------------------
DEF SendData()
DECL CHAR EOL[2]
CHAR CHANNEL_NAME[24]
DECL EKI_STATUS RET
DECL E6AXIS POSITION
BOOL Idle
Idle = Action_Get_Idle() ;take current idle
POSITION = $AXIS_ACT
CHANNEL_NAME[] = SERVER_CONNECTION_LIST[1].NAME[]
RET = EKI_SetReal(CHANNEL_NAME[], "Position/A1", POSITION.A1) ;set current position in xml
RET = EKI_SetReal(CHANNEL_NAME[], "Position/A2", POSITION.A2)
RET = EKI_SetReal(CHANNEL_NAME[], "Position/A3", POSITION.A3)
RET = EKI_SetReal(CHANNEL_NAME[], "Position/A4", POSITION.A4)
RET = EKI_SetReal(CHANNEL_NAME[], "Position/A5", POSITION.A5)
RET = EKI_SetReal(CHANNEL_NAME[], "Position/A6", POSITION.A6)
RET = EKI_SetBool(CHANNEL_NAME[], "Position/Idle", Idle)
RET = EKI_Send(CHANNEL_NAME[], "Position") ;send current position and robot idle
EOL[1]=13
EOL[2]=10
RET = EKI_Send(CHANNEL_NAME[], EOL[])
$TIMER[1]=0 ;timer init
END
--------------------------------------------------------------------------------------------------------------------
DEF Instruction_In()
DECL EKI_STATUS RET
DECL CHAR EOL[2]
CHAR CHANNEL_NAME[24]
INT _DISTANCE
INT _AXIS
_DISTANCE=0
_AXIS=0
EOL[1]=13
EOL[2]=10
CHANNEL_NAME[] = SERVER_CONNECTION_LIST[1].NAME[]
RET = EKI_GetInt(CHANNEL_NAME[],"Distance/Axis",_AXIS)
RET = EKI_GetInt(CHANNEL_NAME[],"Distance/Axis/@Angle",_DISTANCE) ;recive axis and move distance
RET = EKI_Send(CHANNEL_NAME[], "Confirm")
RET = EKI_Send(CHANNEL_NAME[], EOL[]) ;send "confirm"
IF Action_Get_Idle() THEN
Action_Set_InFo(_AXIS, _DISTANCE)
Action_Set_Command_Type(#COMMAND_MOV)
Server_Set_Ready(TRUE)
ENDIF
$FLAG[2] = FALSE
END
- Action
- Idle 執行動作前狀態變更
- 判斷下一步
- 動作結束後 Ready、Idle 狀態變更
GLOBAL DEF Action ( )
Action_Before()
SWITCH ACTION_COMMAND.TYPE
CASE #COMMAND_MOV
Wt_Action_Mov(ACTION_INFO)
ENDSWITCH
Action_After()
END
--------------------------------------------------------------------------------------------------------------------
DEF Action_Before()
Action_Set_Idle(FALSE)
END
--------------------------------------------------------------------------------------------------------------------
DEF Action_After()
IF (NOT Event()) AND (NOT Error()) THEN
Server_Set_Ready(FALSE)
Action_Set_Idle(TRUE)
ENDIF
END
- Action_Mov
- 呼叫 Motion 並且傳入參數 Axis 、 Distance
DEF Wt_Action_Mov ( INFO:IN)
DECL ACTION_INFO_STRUC INFO
Motion_Mov(INFO._AXIS, INFO._DISTANCE)
END
- Motion_Mov
- 判斷為第幾軸
- 移動
DEF Motion_Mov (_AXIS:IN, _DISTANCE:IN)
DECL BOOL RESULT
INT _AXIS
INT _DISTANCE
E6AXIS POSITION
POSITION = {A1 0,A2 0,A3 0,A4 0,A5 0,A6 0}
SWITCH _AXIS
CASE 1
POSITION.A1 = _DISTANCE
CASE 2
POSITION.A2 = _DISTANCE
CASE 3
POSITION.A3 = _DISTANCE
CASE 4
POSITION.A4 = _DISTANCE
CASE 5
POSITION.A5 = _DISTANCE
CASE 6
POSITION.A6 = _DISTANCE
ENDSWITCH
PTP_REL POSITION
END