一、RobotSim基礎
手臂基本介紹
六軸機器手臂

軸向
- A1~A6

空間
- Base空間
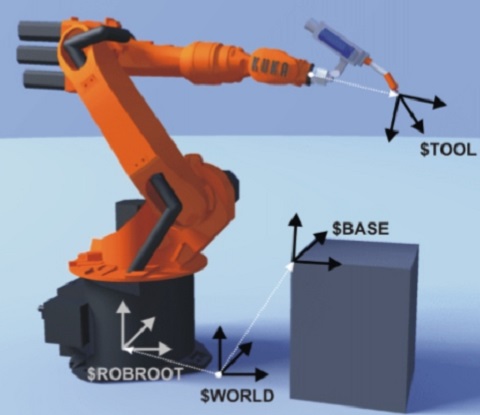
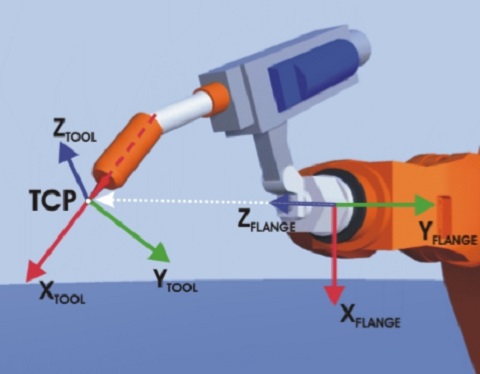
- Tool空間
線上模擬環境
- 我們把模擬環境放在網站上了
- 網址在這邊 RobotSim WebPlayer
- 在模擬器中我們可以學到這些
- 座標系
- WORLD
- BASE
- TOOL
- 操作方式
- XYZ ABC
- AXIS
- 運動指令
- PTP
- LIN
- CIRC(網頁版的模擬器中沒有)
- 軸極限
- A1~A6
- 手臂程式執行方式
- 先教點
- 用指令讓手臂重現動作
- 座標系
RobotSim環境及基本操作
RobotSim 下載-安裝-試用
RobotSim 教點-程式-模擬
- 影片參考 連結.
RobotSim 設定Tool-更新點位-模擬動作
- 影片參考 連結.
RobotSim 設定Base-設定手臂-匯出程式
- 影片參考 連結.
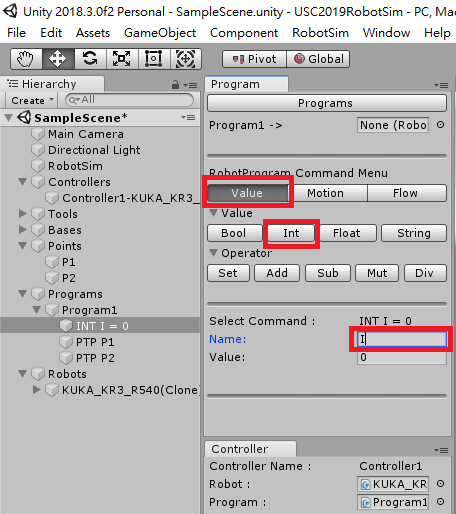
RobotSim程式設計
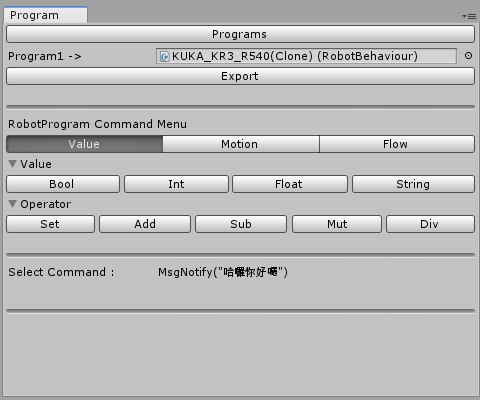
- 變數 Value
- Bool、Int、Float、String
- Set、Add、Sub、Mut、Div
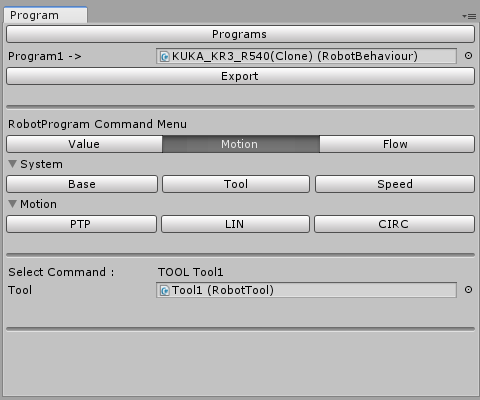
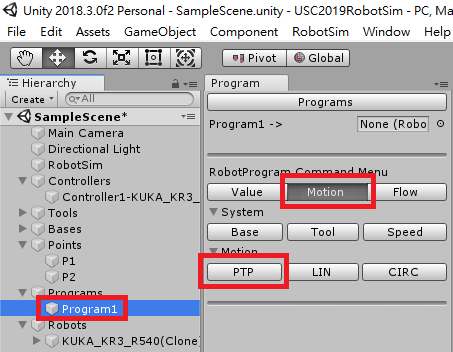
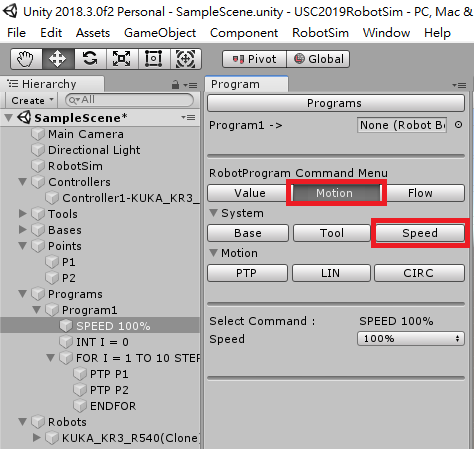
- 動作 Motion
- Base、Tool、Speed
- PTP 、LIN、CIRC
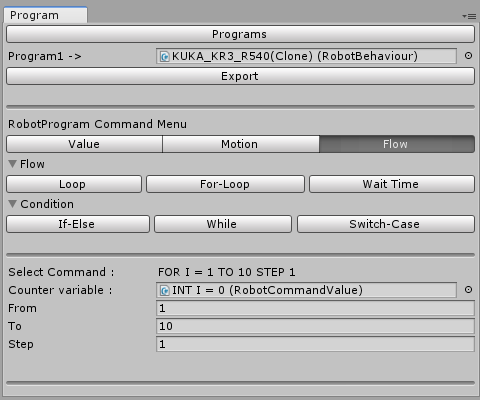
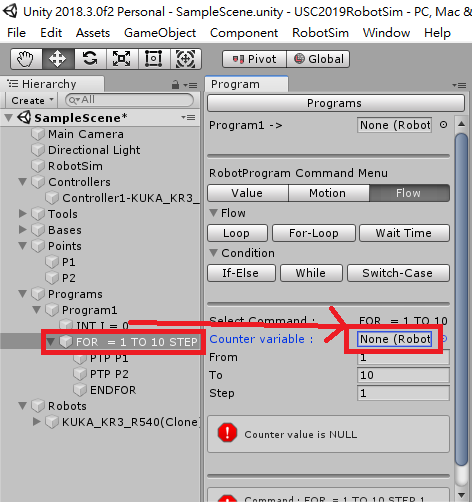
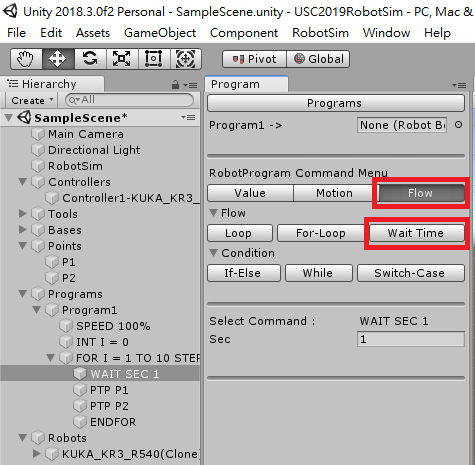
- 流程控制 Flow
- Loop、For-Loop、Wait Time
- If-Else、While、Switch-Case
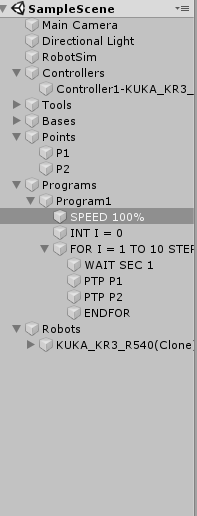
練習
- 匯入RobotSim 下載頁面
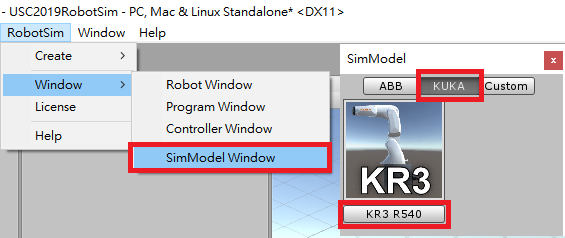
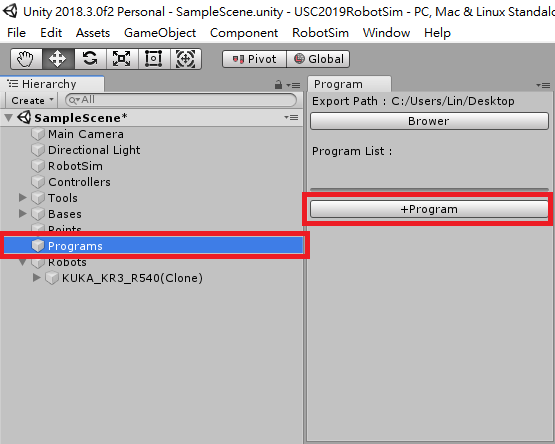
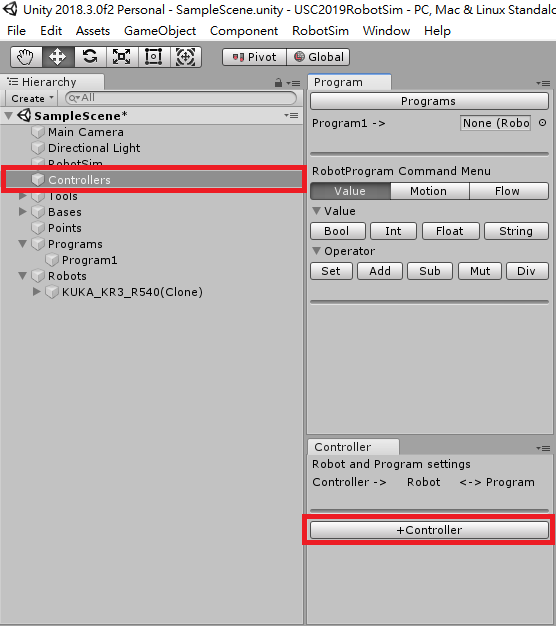
- 開啟Robot視窗、Program視窗、Controller視窗
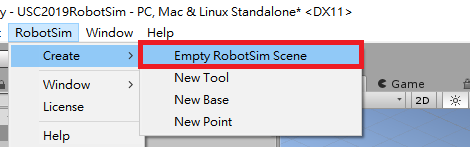
- 加入空場景
- 加入機器手臂 Robot
- 加入手臂程式 Program
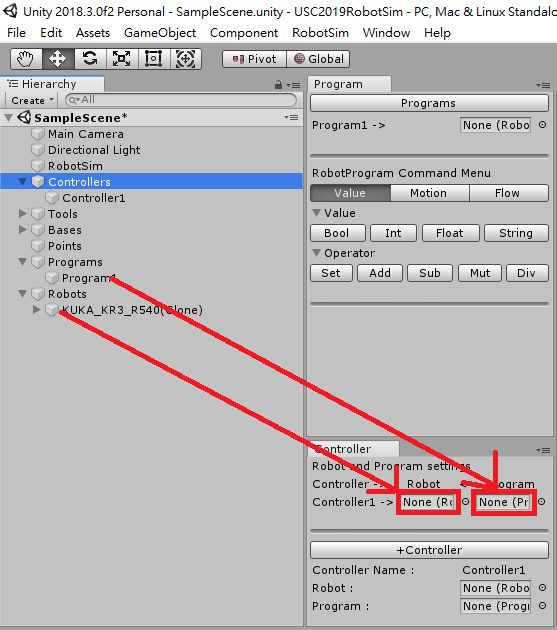
- 加入控制器 Controller
- 連結Robot、Controller、Program
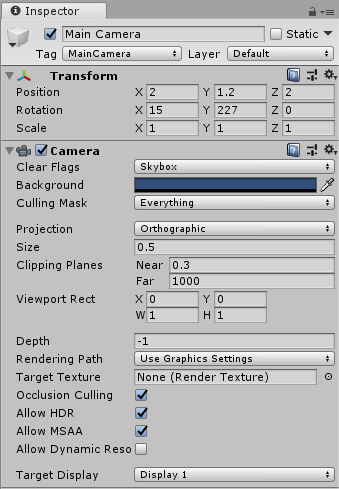
- 設定主攝影機視角
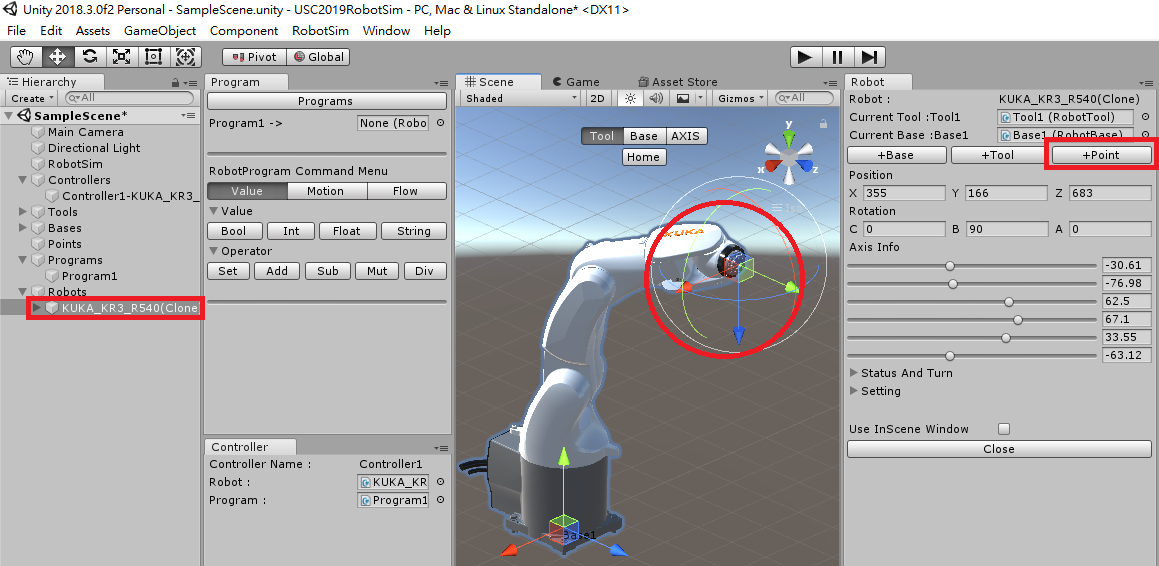
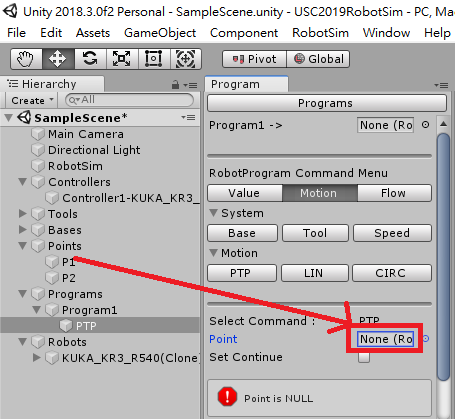
- 控制手臂加入點位1、點位2
- 動作指令 PTP、LIN
- 變數 INT I、流程控制 FOR-LOOP 迴圈
- 設定速度 SPEED、WAIT SEC 指令
成果