六、自動化專案實作 二
KUKA Srver端通訊程式
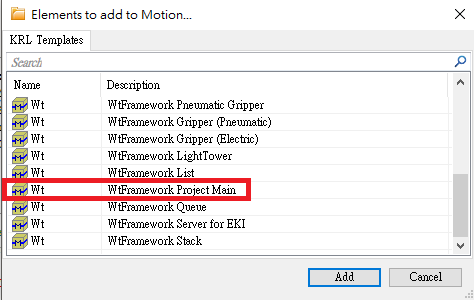
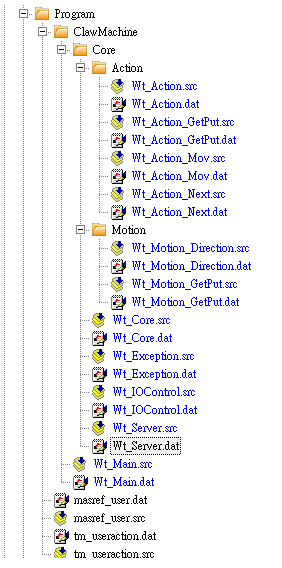
1.建立專案資料夾、加入框架程式
- 建立ClawMachine資料夾
- 加入Main程式、Core資料夾
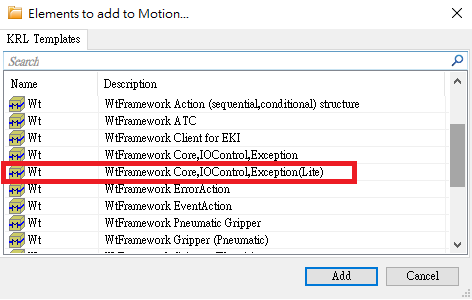
- Core資料夾
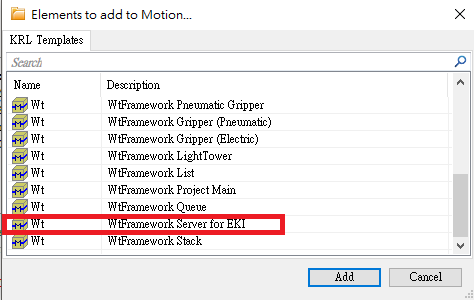
- 加入 Core、Server 程式以及Action、Motion 資料夾
- Action資料夾
- 加入Action程式
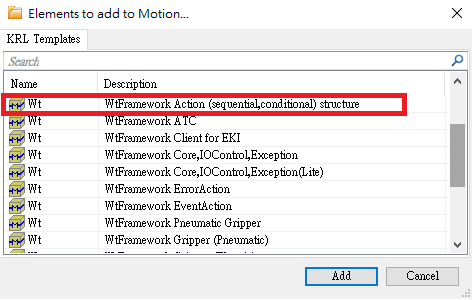
- 加入 Wt_Action_GetPut、Wt_Action_Decide
- Motion資料夾
- 加入 Wt_Motion_Direction、Wt_Motion_GetPut
2.撰寫框架Server程式
- 定義中斷條件,確認手臂是否有收到資料
GLOBAL DEF Server()
;定義Flag[2]=true 中斷所有動作 執行Data_In
GLOBAL INTERRUPT DECL 101 WHEN $FLAG[2]==TRUE DO Data_In()
$FLAG[2] = FALSE ;初始化
INTERRUPT ON 101 ;宣告
Server_Set_Ready(FALSE) ;初始化ready
END
- Data_In_CCD( )為判斷接收資料後執行程式
DEF Data_In()
DECL EKI_STATUS RET
INT _DIRECTION
CHAR CHANNEL_NAME[24]
_DIRECTION = 0
CHANNEL_NAME[] = SERVER_CONNECTION_LIST[1].NAME[]
RET = EKI_GetInt(CHANNEL_NAME[],"Data/Direction",_DIRECTION) ;接收資料
IF Action_Get_Idle() THEN ;Idle為閒置狀態
Action_Set_Command_Info(_DIRECTION) ;將收到資料傳至Info
Action_Set_Command_Type(#COMMAND_DECIDE) ;將Action Type改為判斷
Server_Set_Ready(TRUE) ;Server確認收到資料 可執行
ENDIF
$FLAG[2] = FALSE ;初始化Flag[2]
END
- 加入回傳訊息程式,告訴 PC 已完成動作
GLOBAL DEF Send()
DECL EKI_STATUS RET
DECL CHAR EOL[2]
CHAR CHANNEL_NAME[24]
EOL[1] = 13
EOL[2] = 10 ;ASCII碼 換行字元
CHANNEL_NAME[] = SERVER_CONNECTION_LIST[1].NAME[]
RET = EKI_Send(CHANNEL_NAME[], "Finish") ;傳送結束字串
RET = EKI_Send(CHANNEL_NAME[], EOL[]) ;傳送換行字元
END
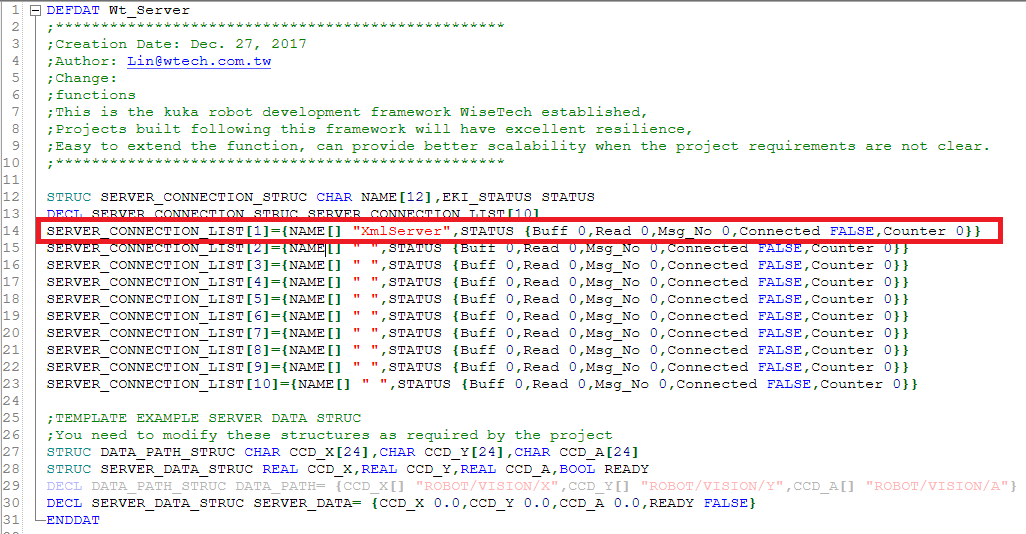
- 定義Server.dat檔
- SERVER_CONNECTION_LIST[1].NAME[ ] 設定為 “XmlServer”
- SERVER_CONNECTION_LIST[1].NAME[ ] 設定為 “XmlServer”
3.在Core需初始化及判斷條件進入Action
- Core初始化
GLOBAL DEF Core ()
BAS(#BASE, 0) ;設定base
BAS(#TOOL, 1) ;設定tool
IOControl() ;IO初始化
Exception() ;事件初始化
Server() ;Server初始化
Action_Set_Idle(TRUE)
Server_Start(1) ;開啟Server
END
- Core_Run判斷進入Action條件
GLOBAL DEF Core_Run()
PTP XHOME ;home點
REPEAT
WHILE ( ( NOT Event() ) AND ( NOT Error() ) )
IF Server_Get_Ready() THEN ;判斷Ready
Action()
ENDIF
ENDWHILE
UNTIL SYS_EXIT
END
- 需將 XHOME 點 A5 軸改為 90度
- 在Core_Run() XHOME 上點按F12
- XHOME1 A5也需要改90度 A1改為45度
4.Action判斷條件
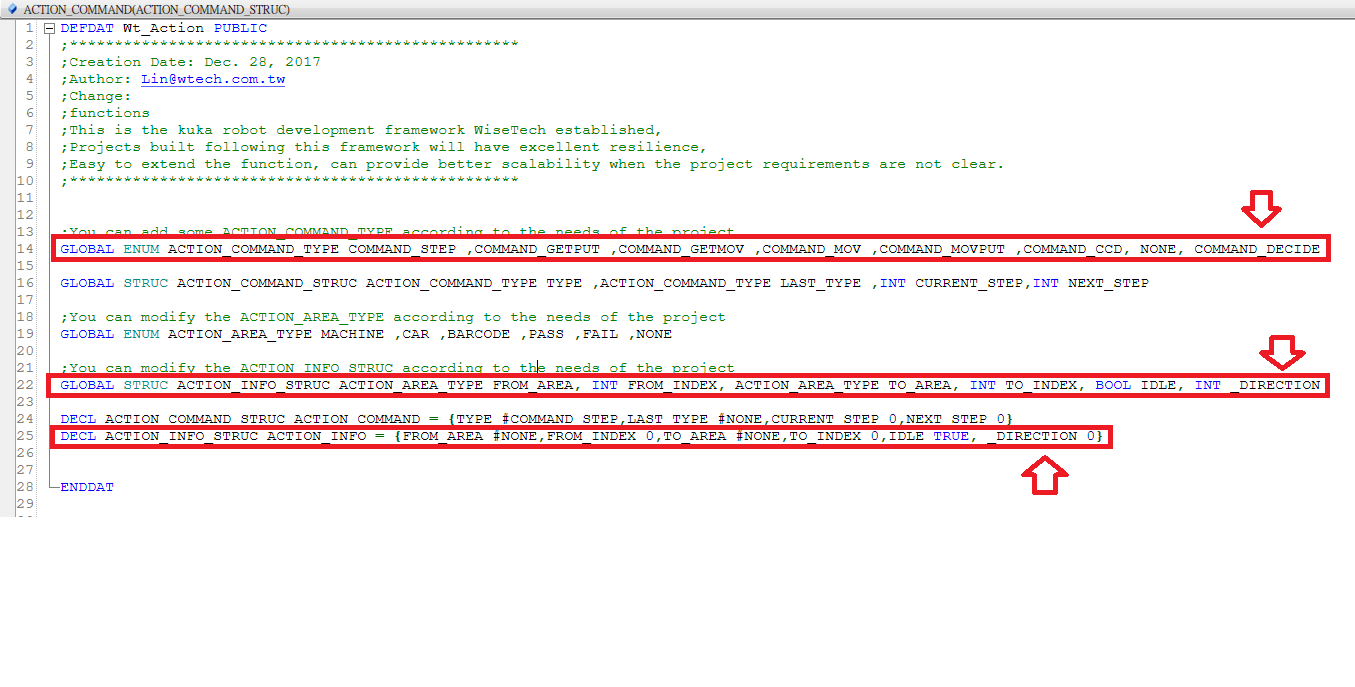
- 需再Action.dat檔內加入宣告
GLOBAL ENUM ACTION_COMMAND_TYPE COMMAND_DECIDE ;新增一個判斷枚舉
GLOBAL STRUC ACTION_INFO_STRUC INT _DIRECTION ;新增方向INT
DECL ACTION_INFO_STRUC ACTION_INFO 加入 _DIRECTION 0 ;加入INFO 初始直為0
- Action內判斷現在需要執行內容
GLOBAL DEF Action ( )
Action_Before() ;Action開始前要做的事
SWITCH ACTION_COMMAND.TYPE
CASE #COMMAND_DECIDE ;判斷是移動還是夾
Wt_Action_Decide(ACTION_INFO)
RETURN
CASE #COMMAND_MOV ;移動
Wt_Action_Mov(ACTION_INFO)
CASE #COMMAND_GETPUT ;夾
Wt_Action_GetPut()
ENDSWITCH
Action_After() ;Action結束後要做的事
END
- Action結束後 After需要判斷此次命令動作是否結束
DEF Action_After()
IF (NOT Event()) AND (NOT Error()) THEN
SWITCH ACTION_COMMAND.TYPE ;如果是移動or夾
CASE #COMMAND_MOV
Server_Set_Ready(FALSE) ;Ready = FALSE
Action_Set_Idle(TRUE) ;Idle改回TRUE
Send() ;傳送結束指令
CASE #COMMAND_GETPUT
Server_Set_Ready(FALSE)
Action_Set_Idle(TRUE)
Send()
DEFAULT
ENDSWITCH
ENDIF
END
- 讓程式能從外面變更Type、Info
GLOBAL DEF Action_Set_Command_Type(_COMMAND_TYPE:IN)
DECL ACTION_COMMAND_TYPE _COMMAND_TYPE
ACTION_COMMAND.TYPE = _COMMAND_TYPE ;下一步改為判斷
END
GLOBAL DEF Action_Set_Command_Info(_TO_INDEX:IN)
INT _TO_INDEX
ACTION_INFO._DIRECTION = _TO_INDEX ;Server接收到資料存進Info
END
- 判斷 Wt_Action_Decide() 下一步為 Mov 還是 GetPut
DEF Wt_Action_Decide (_ACTION_INFO:IN )
DECL ACTION_INFO_STRUC _ACTION_INFO
SWITCH _ACTION_INFO._DIRECTION
CASE 5 ;夾 5
Action_Set_Command_Type(#COMMAND_GETPUT)
DEFAULT ;移動 1~4
Action_Set_Command_Type(#COMMAND_MOV)
ENDSWITCH
END
- Action_Mov呼叫Motion
DEF Wt_Action_Mov ( _ACTION_INFO:IN )
DECL ACTION_INFO_STRUC _ACTION_INFO
Wt_Motion_Direction(_ACTION_INFO._DIRECTION) ;呼叫motion並經INFO的位置數值傳入
END
- Action_GetPut()呼叫Motion
DEF Wt_Action_GetPut ()
Wt_Motion_GetPut ()
END
5.Motion執行動作
- Motion動作 : 移動
DEF Wt_Motion_Direction (_DIRECTION:IN)
INT _DIRECTION, DISTANCE_ADD, DISTANCE_DEL
E6POS POSITION
DISTANCE_ADD = 100 ;移動距離
DISTANCE_DEL = -100
POSITION = {X 0,Y 0,Z 0,A 0,B 0,C 0}
SWITCH _DIRECTION
CASE 1 ;前
POSITION.X = DISTANCE_ADD
CASE 2 ;後
POSITION.X = DISTANCE_DEL
CASE 3 ;左
POSITION.Y = DISTANCE_ADD
CASE 4 ;右
POSITION.Y = DISTANCE_DEL
ENDSWITCH
LIN_REL POSITION ;移動至運算結果位置
END
- Motion動作 : 夾
DEF Wt_Motion_GetPut ()
INT DISTANCE_ADD, DISTANCE_DEL
E6POS POSITION
DISTANCE_ADD = 100
DISTANCE_DEL = -100
POSITION = {X 0,Y 0,Z 0,A 0,B 0,C 0}
POSITION.Z = DISTANCE_DEL ;Z軸向下
LIN_REL POSITION ;移動至運算結果位置
POSITION.Z = DISTANCE_ADD ;Z軸向上
LIN_REL POSITION
PTP XHOME1 ;至放置點
PTP XHOME ;回HOME點
END
6.XmlServer設定檔
<ETHERNETKRL>
<CONFIGURATION>
<EXTERNAL>
<TYPE>Client</TYPE>
</EXTERNAL>
<INTERNAL>
<IP>172.31.1.147</IP>
<PORT>54600</PORT>
<ALIVE Set_Flag="1"/>
</INTERNAL>
</CONFIGURATION>
<RECEIVE>
<XML>
<ELEMENT Tag="Data/Direction" Type="INT" Set_Flag="2"/>
</XML>
</RECEIVE>
<SEND>
<XML>
</XML>
</SEND>
</ETHERNETKRL>