五、自動化專案實作 一
KUKA Srver端通訊程式 EKI基礎
1.網路通訊手臂EKI
- Server 設定
- 在 Files 中打開 Config\User\Commoon\EthernetKRL\XmlServer.xml
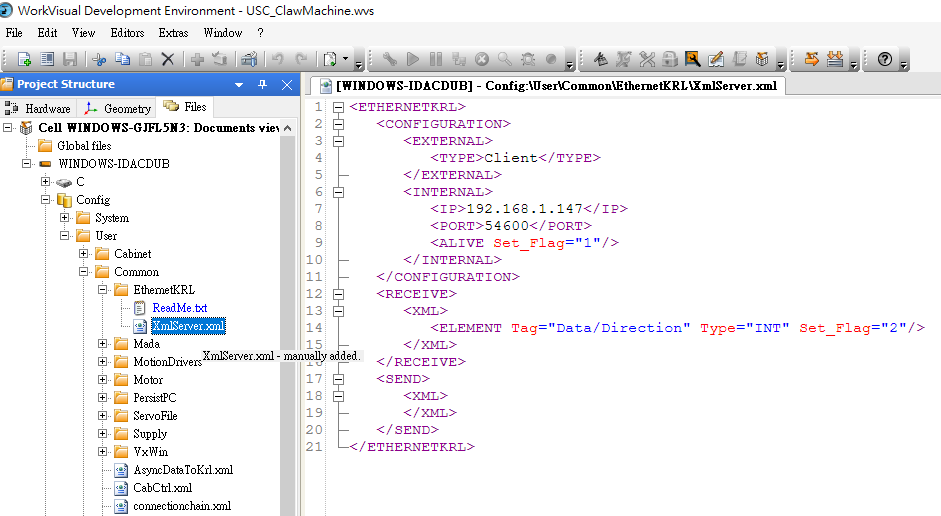
- 在 Files 中打開 Config\User\Commoon\EthernetKRL\XmlServer.xml
<ETHERNETKRL>
<CONFIGURATION>
<EXTERNAL>
<TYPE>Client</TYPE> <!--設定外部為Client-->
</EXTERNAL>
<INTERNAL>
<IP>172.31.1.147</IP> <!--設定連線IP-->
<PORT>54600</PORT> <!--設定通訊埠-->
<ALIVE Set_Flag="1"/> <!--當確定連線後Flag[1] = TRUE-->
</INTERNAL>
</CONFIGURATION>
<RECEIVE>
<XML>
<ELEMENT Tag="Data/Direction" Type="String" Set_Flag="2"/> <!--設定接收到的資料 Tag="路徑" Type="資料型別" 接收資料後Flag[2]=TRUE-->
</XML>
</RECEIVE>
<SEND>
<XML>
<!--此部分可設定手臂傳出資料 例:<ELEMENT Tag="Data/Direction" Type="STRING"/> -->
</XML>
</SEND>
</ETHERNETKRL>
- 在資料夾中新增程式
- 在 KRL\R1\Program\test 資料夾點擊右鍵選取 Add > Module 加入後命名程式名稱為 : XmlServer
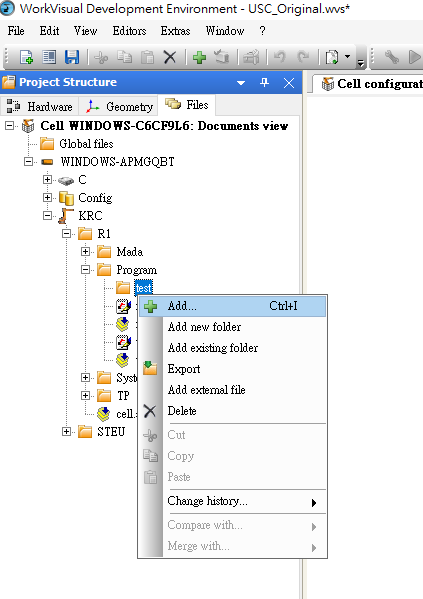
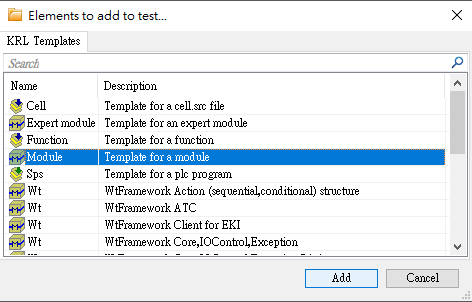
- 在 KRL\R1\Program\test 資料夾點擊右鍵選取 Add > Module 加入後命名程式名稱為 : XmlServer
- EKI手臂程式
DEF XmlServer( )
INT i
DECL EKI_STATUS RET
CHAR valueChar[20]
CHAR EOL[2]
EOL[1] = 13 ;ASCII碼 13 = \r
EOL[2] = 10 ;10 = \n
$FLAG[1] = FALSE
$FLAG[2] = FALSE
RET=EKI_Init("XmlServer") ;初始化
RET=EKI_Open("XmlServer") ;開啟
wait for $FLAG[1] ;等待連線
FOR i=(1) TO (20) ;需要先給初始值 否則程式會有錯誤
valueChar[i]=0
ENDFOR
WAIT FOR $FLAG[2] == TRUE ;等待有資料傳入
RET=EKI_GetString("XmlServer","Data/Direction",valueChar[]) ;讀取資料存入valueChar[]
MsgNotify(valueChar[]) ;將資料印在Smart-Pad訊息欄上
RET = EKI_Send("XmlServer", "Comfirm") ;傳送Comfirm確定有接收到資料
RET = EKI_Send("XmlServer", EOL[]) ;傳送換行字元
;Send 可將資料先進行存取在傳送
;例: RET = EKI_Set("XmlServer","Data/Direction", "Comfirm")
; RET = EKI_Send("XmlServer","Data/Direction")
wait for $FLAG[1]==FALSE
RET=EKI_Clear("XmlServer")
END
2.程式匯入至手臂
- 需先變更電腦系統地區設定
- 控制台 > 變更日期、時間或數字格式> 系統管理 > 變更系統地區設定 > 選擇英文(美國) PS. 需要重新啟動電腦
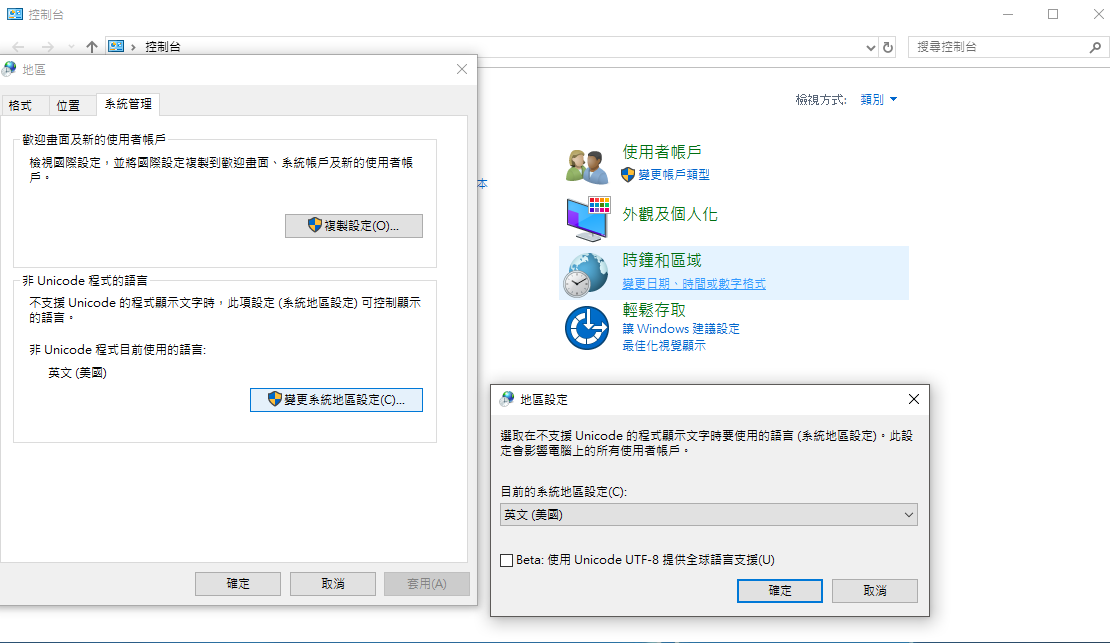
- 控制台 > 變更日期、時間或數字格式> 系統管理 > 變更系統地區設定 > 選擇英文(美國) PS. 需要重新啟動電腦
- 將電腦 IP 設成和手臂相同網段
- 開啟網路和忘記網路設定 > 變更介面卡選項 > 選擇乙太網路案右鍵 > 內容 > 網際網路通訊協定第4版 (TCP/IPv4)
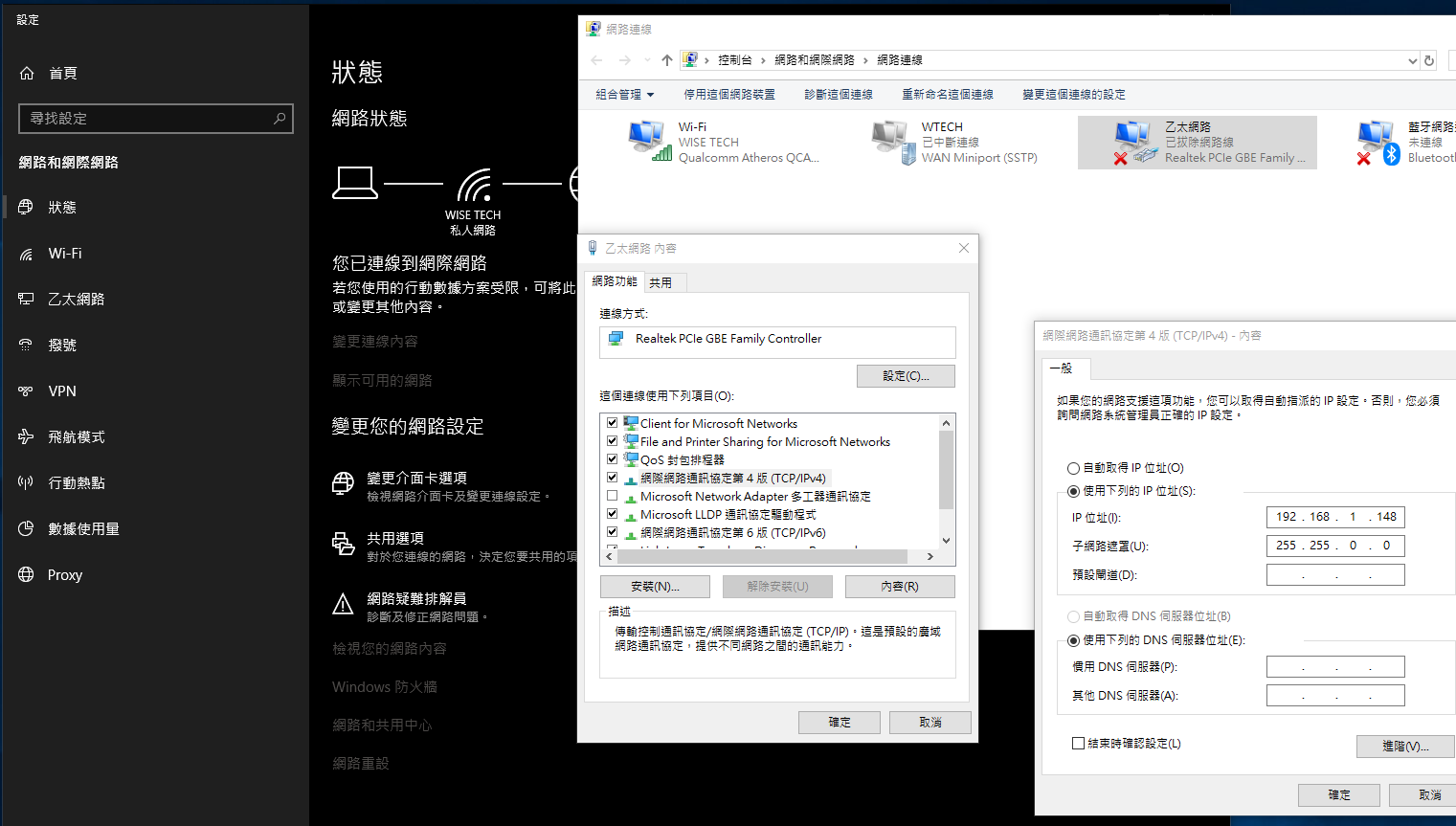 - 範例中手臂 IP 為 192.168.1.147
- 範例中手臂 IP 為 192.168.1.147
- 開啟網路和忘記網路設定 > 變更介面卡選項 > 選擇乙太網路案右鍵 > 內容 > 網際網路通訊協定第4版 (TCP/IPv4)
- 傳送程式至手臂端
- 需先確認手臂用戶為 Expert、並且無任何程式正在執行或預備狀態
- PC 與手臂進行網路線連接
- 點選 WorkVisual 上方橘色向右鍵頭
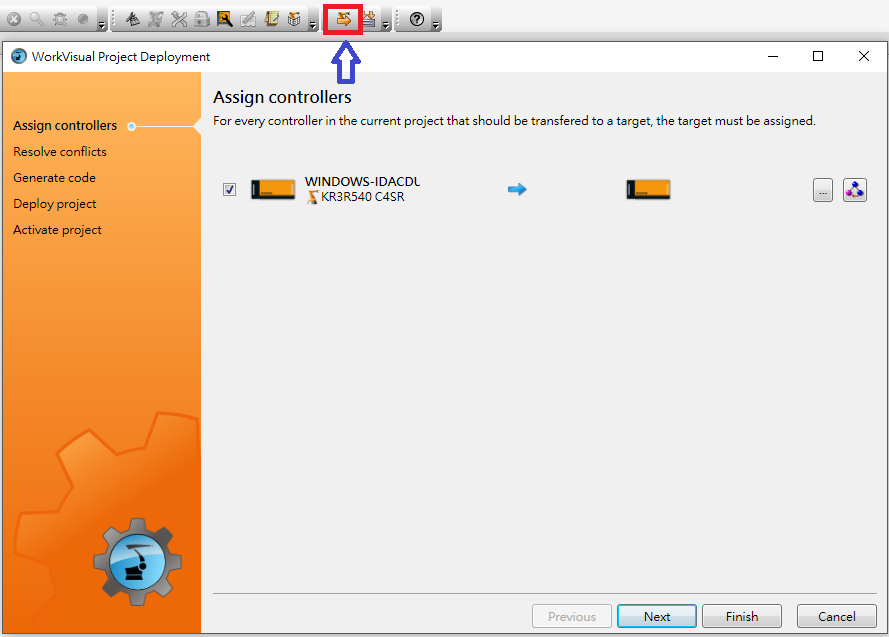
- 直接點選 Finish
- 等待手臂 Smart-Pad 出現對話框 兩次都點選 Yes
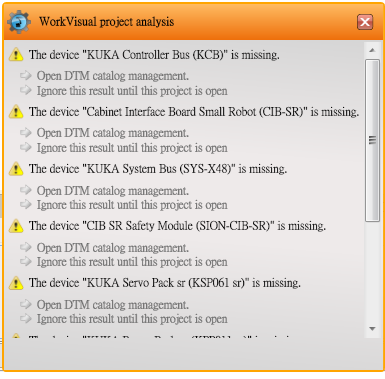
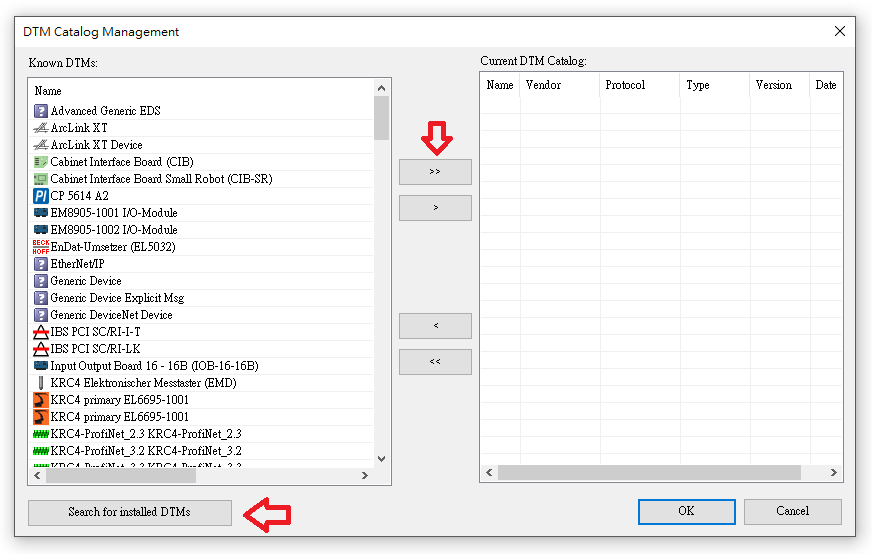
- PS. 打開程式出現下圖錯誤訊息 需再做設定程式才能傳上手臂
- 打開左上角 Extras > DTM-Catalog Management
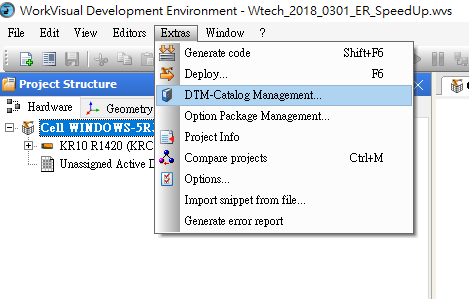
- 需要先按下方 Search for installed DTMs 搜尋已安裝 DTM
- 在案上方箭頭指向的按鍵 “»” 加入當前的DTM
3.通訊測試
- 電腦 PC 連線測試
- 開啟 cmd 命令提示字元
- 輸入 telnet + IP + Port
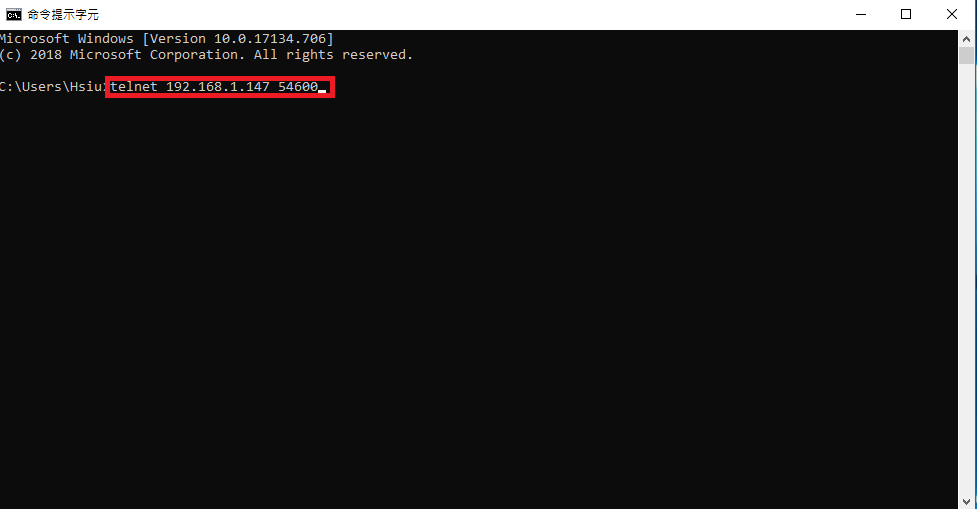
- 將 XML 格式複製 在 cmd 介面點擊滑鼠右鍵
IP 192.168.1.147 Port 54600 前 <Data><Direction>1</Direction></Data> 後 <Data><Direction>2</Direction></Data> 左 <Data><Direction>3</Direction></Data> 右 <Data><Direction>4</Direction></Data> 夾 <Data><Direction>5</Direction></Data>
- VisualStudio WinForm Client 程式測試
- 提示 : 需要注意程式 IP 位置設定
作業內容
- EKI 程式內容運作
- 利用手臂與 PC、WinForm 進行通訊傳遞
- Xml 標籤名稱需要更換、IP位置須改為相同