四、WtFramework 開發框架
Winform Client 端通訊程式
- 安裝
- 於 WorkVisual 內點選 File/Cataloghandling…
- 於 Catalogs 視窗點選 KRL Templates 後按 > 按鈕 加入功能
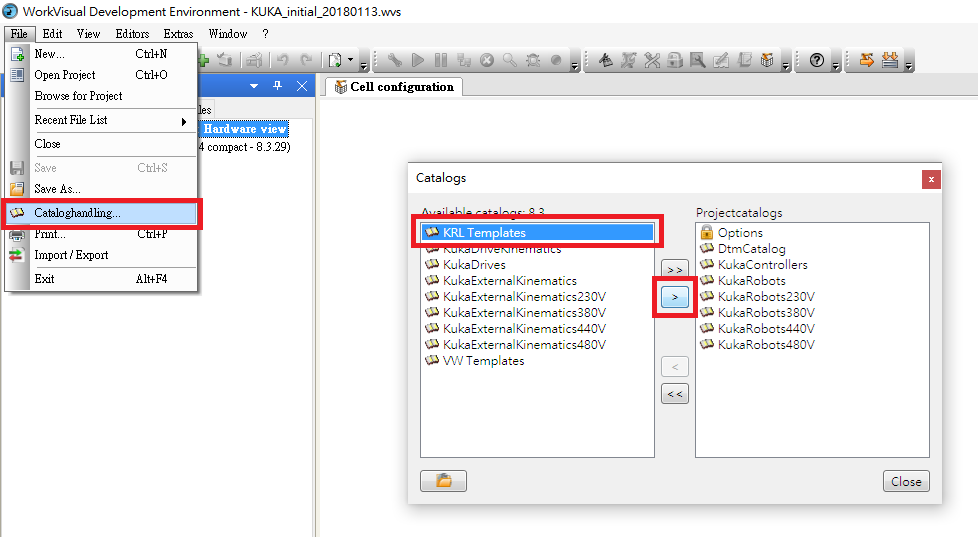
- 將 WtFramework.zip 解壓縮後將 KUKA Templates資料夾 覆蓋 C:\Users\User\Documents\KUKA Templates 資料夾
- 網路通訊
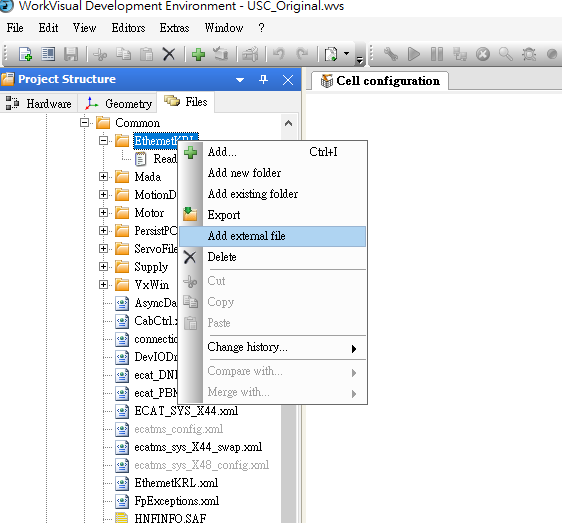
- 下載xml檔案:https://github.com/yazelin/usc2019-RobotSim/raw/master/src/XmlServer.zip
- 在 EthernetKRL 點右鍵選擇 Add external file 加入 Xml.Servver.xml
- 點選XmlServer.Xml
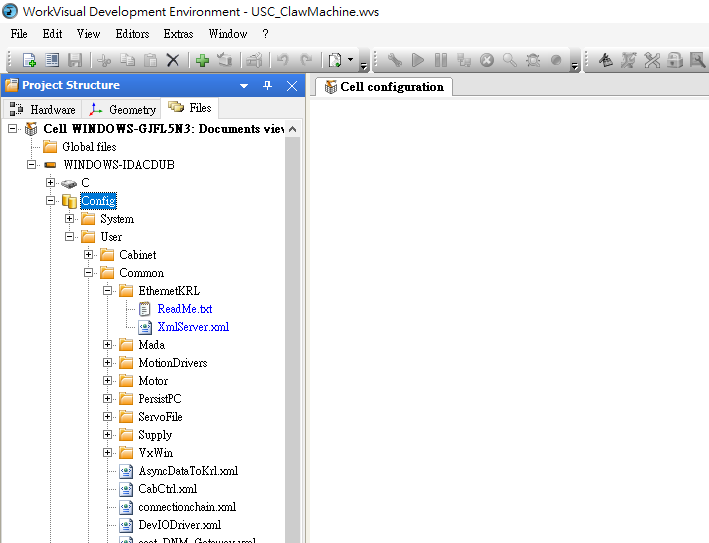
- Server設定
<ETHERNETKRL>
<CONFIGURATION>
<EXTERNAL>
<TYPE>Client</TYPE>
</EXTERNAL>
<INTERNAL>
<IP>192.168.1.147</IP> <!--設定手臂IP-->
<PORT>54600</PORT> <!--設定連線port-->
<ALIVE Set_Flag="1"/> <!--當確定連線後Flag[1] = TRUE-->
</INTERNAL>
</CONFIGURATION>
<RECEIVE>
<XML>
<ELEMENT Tag="Data/Direction" Type="INT" Set_Flag="2"/> <!--設定接收到的資料 Tag="路徑" Type="資料型別" 接收資料後Flag[2]=TRUE-->
</XML>
</RECEIVE>
<SEND>
<XML>
<ELEMENT Tag="Result/Answer" Type="STRING"/> <!--;設定輸出資料-->
</XML>
</SEND>
</ETHERNETKRL>
- 夾娃娃機PC端操作介面
- 步驟
- 介面設計
- 開啟關閉功能
- 建立按鈕傳送訊息
- 註冊Click事件
- 傳送接收
- 測試及改寫
- Winform 介面設計
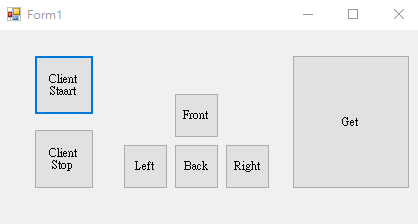
- Client 啟動及關閉按鍵 Form1
Client client = new Client();
private void buttonStart_Click(object sender, EventArgs e)
{
client.Start("127.0.0.1", 54600);
}
private void buttonStop_Click(object sender, EventArgs e)
{
client.Stop();
}
- Client 啟動及關閉程式 Client
class Client
{
TcpClient myClient; //建立TcpClient
public Client() { }
public void Start(string ip, int port)
{
if (myClient != null) //myClient有被new出來的話 結束
{
return;
}
myClient = new TcpClient(ip, port); //設定Ip跟Port
Task.Run(() => ClientService()); //在另一個執行續中執行 ClientService() ; 由電腦決定是否產生新執行續
}
public void Stop()
{
if (myClient != null)
{
myClient.Close(); //關閉Client
myClient = null;
}
}
}
- 建立各項按鈕需傳入資料 Form1
private void SetData(string command)
{
client.Send(command);
}
private void buttonFront_Click(object sender, EventArgs e)
{
SetData("1");
}
private void buttonBack_Click(object sender, EventArgs e)
{
SetData("2");
}
private void buttonLeft_Click(object sender, EventArgs e)
{
SetData("3");
}
private void buttonRight_Click(object sender, EventArgs e)
{
SetData("4");
}
private void buttonGet_Click(object sender, EventArgs e)
{
SetData("5");
}
- 提示-注意
- 元件名稱
- 註冊事件
- Client端傳送程式 Client
private string sendData = string.Empty;
public void Send(string data)
{
sendData = data;
}
private void ClientService()
{
while (true)
{
try
{
if (myClient != null) //myClient有被new出來
{
StreamReader streamReader = new StreamReader(myClient.GetStream()); //建立StreamReader
StreamWriter streamWriter = new StreamWriter(myClient.GetStream()); //建立StreamWriter
while (myClient.Connected) //myClient連線
{
if (sendData != string.Empty) //sendData不是空字串
{
streamWriter.WriteLine(sendData); //寫出sendData資料
streamWriter.Flush(); //傳送
Console.WriteLine("Client To Server : " + sendData);
var data = streamReader.ReadLine(); //讀取Server端傳回資料
Console.WriteLine("From Server : " + data);
sendData = string.Empty;
}
SpinWait.SpinUntil(() => { return false; }, 10); //等待0.01秒
}
}
}
catch (Exception ex) // 執行try發生錯誤
{
Console.WriteLine(ex.ToString()); //印出錯誤訊息
break;
}
}
}
-
Server端測試程式:https://github.com/yazelin/usc2019-RobotSim/raw/master/src/WinFormServerTest.zip
- 改寫傳送資料為XML Form1
private void SetData(string command) { string dataSend = " "; dataSend = "<Data><Direction>"+ buttonNumber +"</Direction></Data>"; client.Send(dataSend); } - PC端手臂模擬程式
模擬程式下載: https://github.com/yazelin/usc2019-RobotSim/raw/master/src/Play.zip
解壓縮後執行 USC2019RobotSim.exe
IP 127.0.0.1
Port 54600
前 <Data><Direction>1</Direction></Data>
後 <Data><Direction>2</Direction></Data>
左 <Data><Direction>3</Direction></Data>
右 <Data><Direction>4</Direction></Data>
夾 <Data><Direction>5</Direction></Data>