RobotSim Project
- Display message
RobotCommandMessage.cs Code
//RobotCommandMessage.cs
using RobotSim;
using UnityEngine;
using System;
public class RobotCommandMessage : RobotCommand
{
//display message
public string Message = string.Empty;
//check message
public override bool Check()
{
if (Message == string.Empty)
{
errorMassage = "message empty";
return false;
}
else
{
return true;
}
}
public override int Execute()
{
//use DebugConsole to print message
Debug.Log(Message);
// go to next line
return (line + 1);
}
public override string ExportDat()
{
//no message needed to be sent to robot dat files
return string.Empty;
}
public override string ExportSrc()
{
//output MsgNotify("message") to robot src file
return tab + "MsgNotify(\"" + Message + "\")" + Environment.NewLine;
}
public override string UpdateName()
{
////rename Gameobject
return (gameObject.name = "MsgNotify(\"" + Message + "\")");
}
}
- RobotSim code for clip doll machine
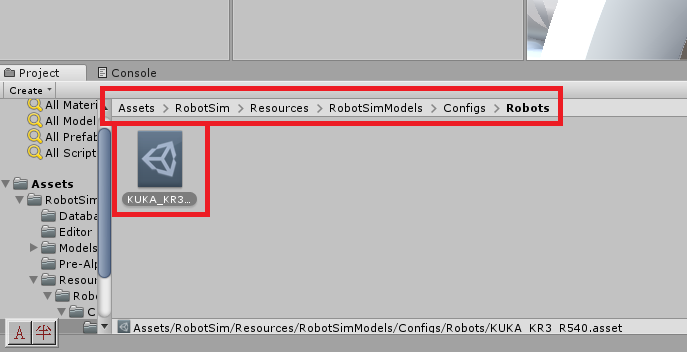
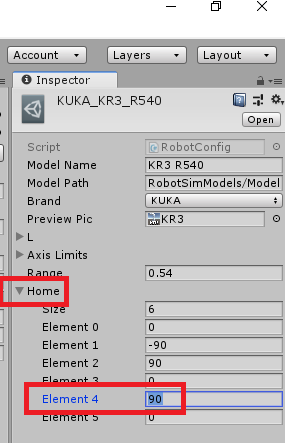
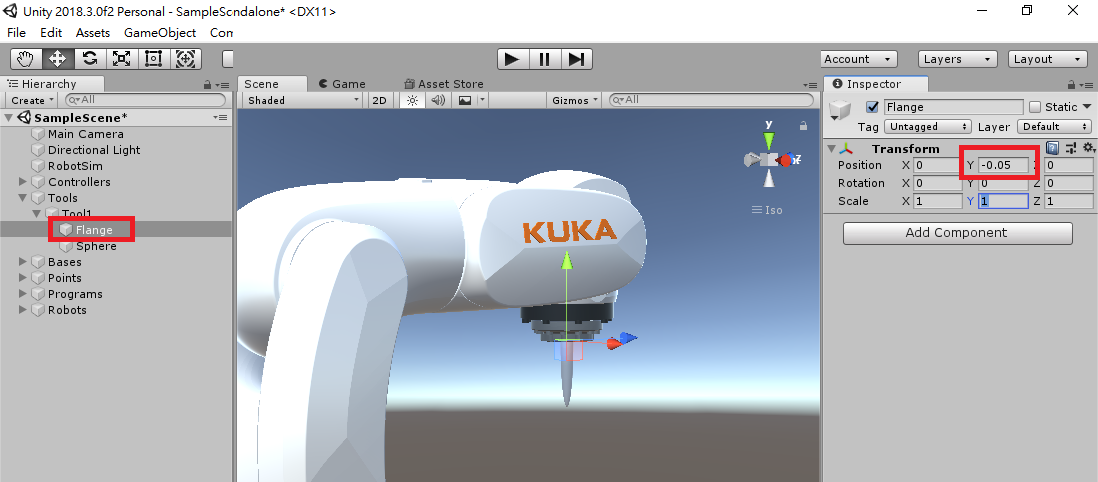
- set Home point
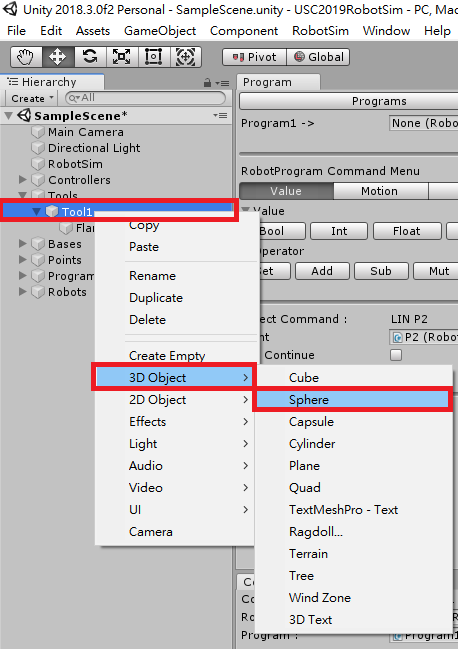
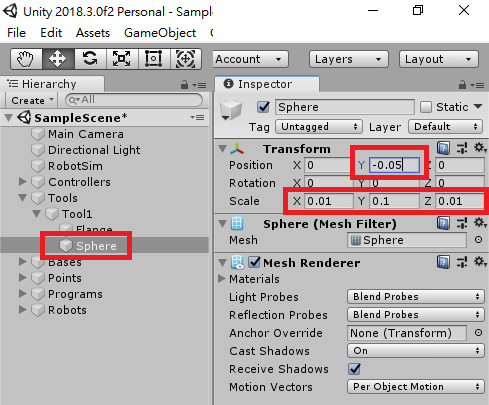
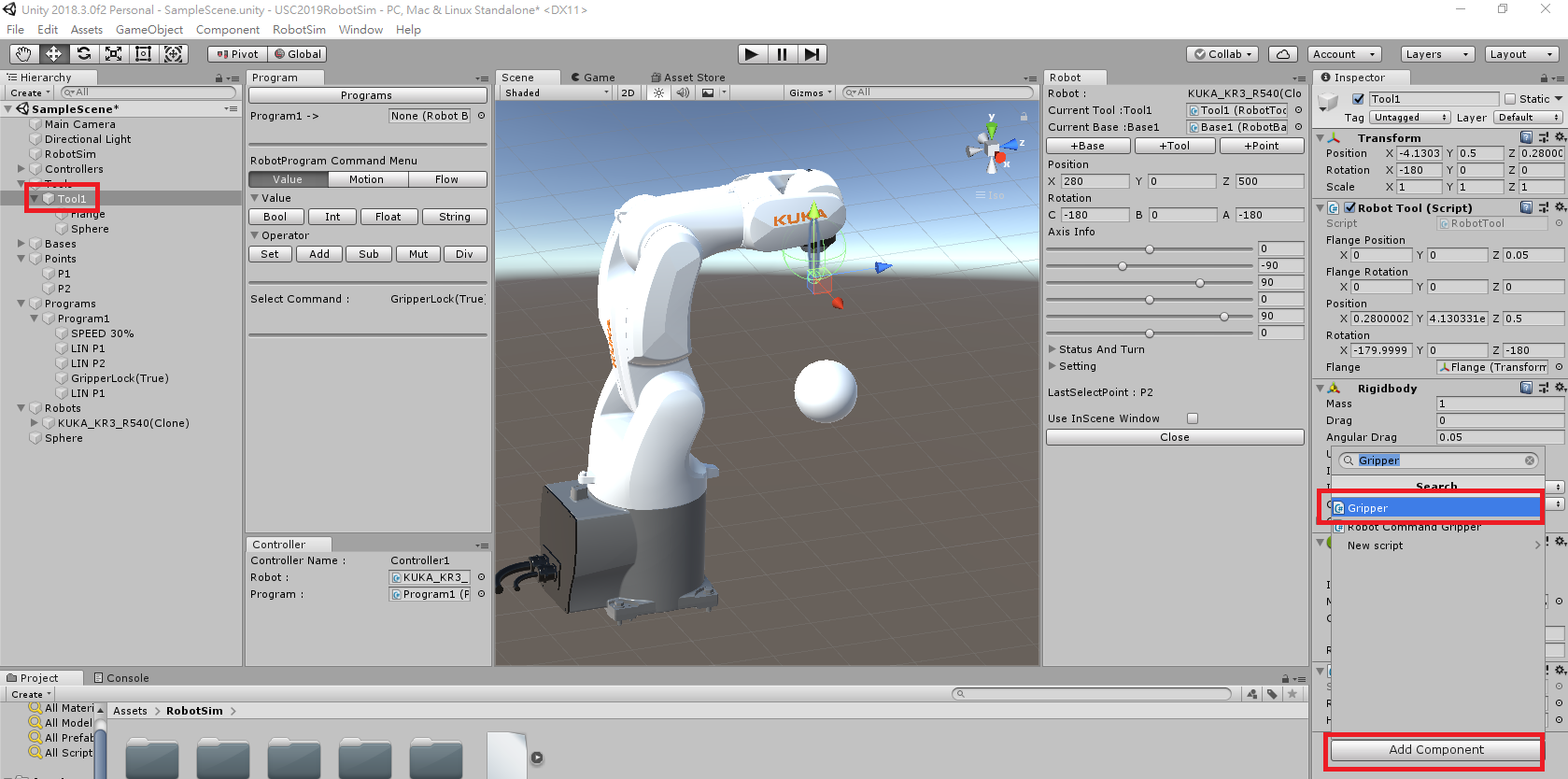
- Add a gripper (using Spherical ball)
- Add a gripper code
//Gripper.cs
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Gripper : MonoBehaviour
{
// Gripper code has two methods for gripping
// 1.use OnTriggerEnter to catch objects within a default range,and the parent of the holding object is set up to Gripper
// 2.use the gripper catching animation to move the gripper, and use Rigidbody function for Clipping
//declare ready object: readyGet
public Transform readyGet;
//declare holding object: holdingObject
public Transform holdingObject;
//declare Lock() as catching command, and set readyGet's Parent as Gripper
public void Lock(Transform product)
{
if (holdingObject == null)
{
if (product)
{
product.transform.parent = transform;
holdingObject = product;
}
}
}
//declare Unlock() to return holding object
public Transform Unlock()
{
Transform returnObject = holdingObject;
holdingObject = null;//clear holding object
return returnObject;
}
//declare LockReadyGet() for catching a ready object
public void LockReadyGet()
{
Lock(readyGet);
}
//declare UnlockToWorld() to unlock the holding object
public void UnlockToWorld()
{
if (holdingObject)
{
holdingObject.parent = null;
}
holdingObject = null;//put the holding object to World Root
}
//declare OnTriggerEnter for detecting object ready for gripping
void OnTriggerEnter(Collider other)
{
readyGet = other.transform;
}
//declare OnTriggerExit
void OnTriggerExit(Collider other)
{
if (readyGet == other.transform)
{
readyGet = null;
}
}
}
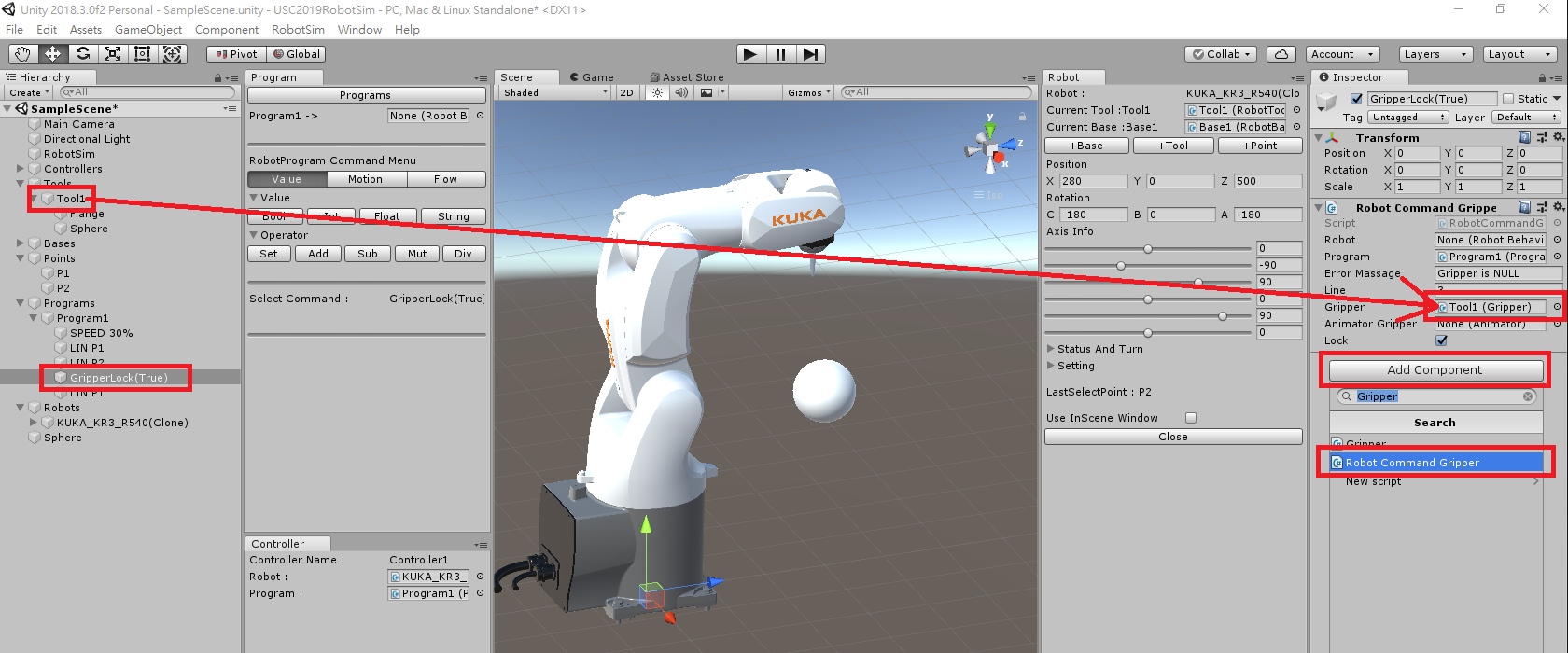
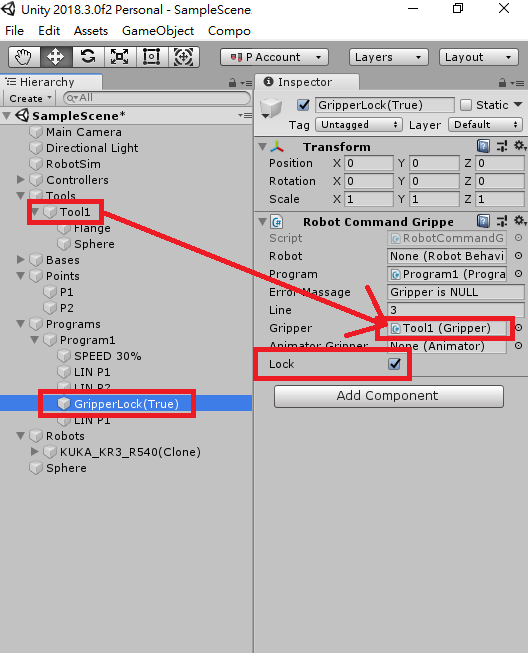
- Add GripperCommand
//RobotCommandGripper.cs
using UnityEngine;
using RobotSim;
using System;
public class RobotCommandGripper : RobotCommand
{
//declare Gripper object: gripper
public Gripper gripper;
//Gripper animator
public Animator animatorGripper;
//declare boolen Lock and set as false
public bool Lock = false;
// Check()
public override bool Check()
{
if (gripper)
{
return true;
}
else
{
errorMassage = "Gripper is NULL";
return false;
}
}
//Execute
public override int Execute()
{
if (Lock)
{
//gripping
gripper.LockReadyGet();
//play gripping animation
if (animatorGripper)
{
animatorGripper.speed = 1;
animatorGripper.Play("Lock", -1, 0);
}
}
else
{
//unlock gripper
gripper.UnlockToWorld();
//play un-lock animation
if (animatorGripper)
{
animatorGripper.speed = 1;
animatorGripper.Play("UnLock", -1, 0);
}
}
return (line + 1);
}
public override string ExportDat()
{
//return nothing to Dat file
return "";
}
public override string ExportSrc()
{
//return GripperLock(true/false) to src file
return tab + "GripperLock(" + Lock.ToString() + ");" + Environment.NewLine;
}
public override string UpdateName()
{
//rename Gameobject
return (gameObject.name = "GripperLock(" + Lock.ToString() + ")");
}
}
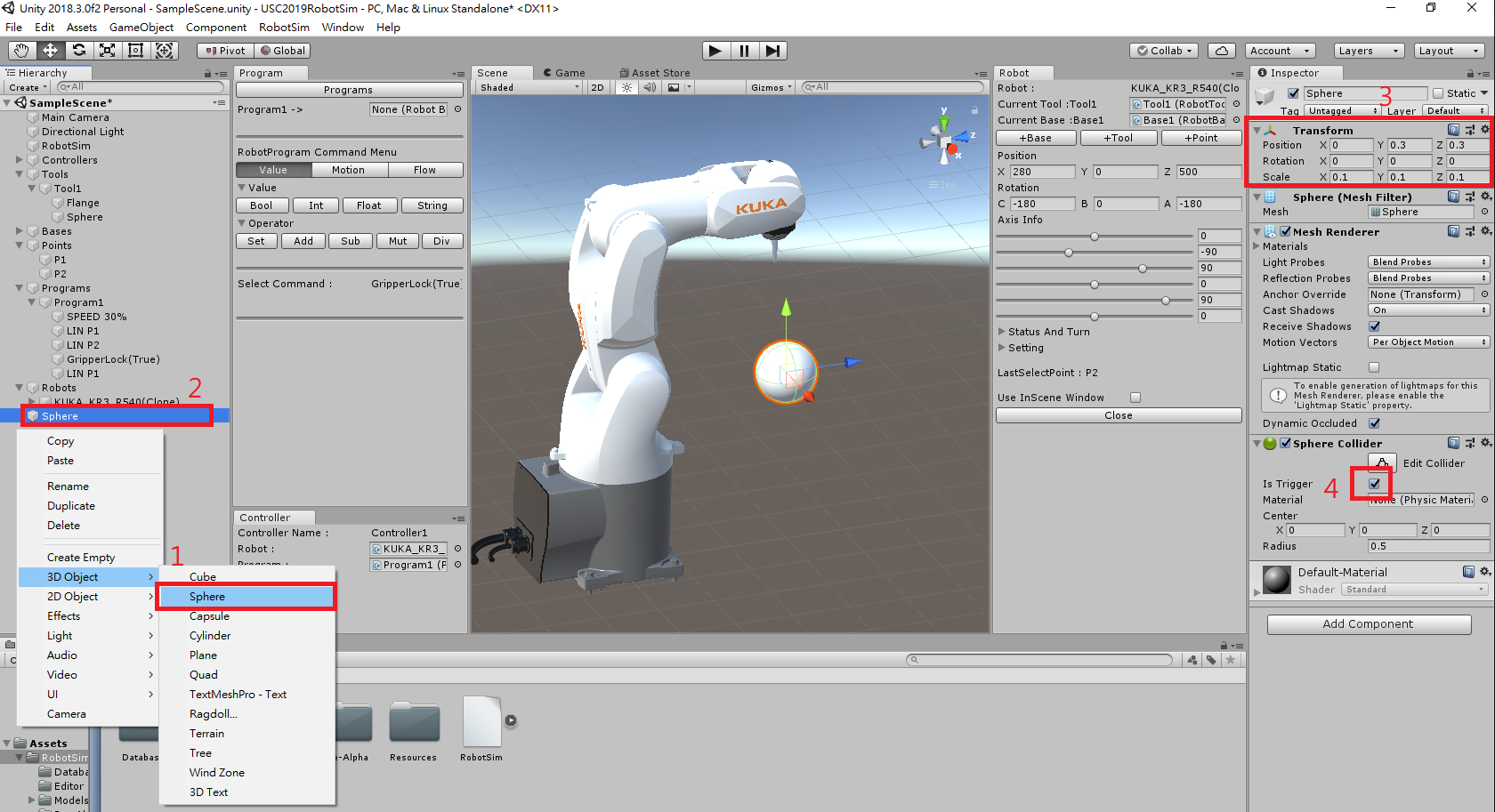
- adjust gripper reaching range to detect object for gripping
- Add object
- Add gripping func to gripperscript
- Add Empty GameObject and then add GripperCommand
- Test
- Repeat
- what else RobotSim can do?
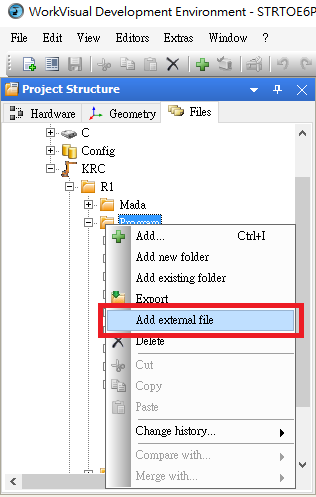
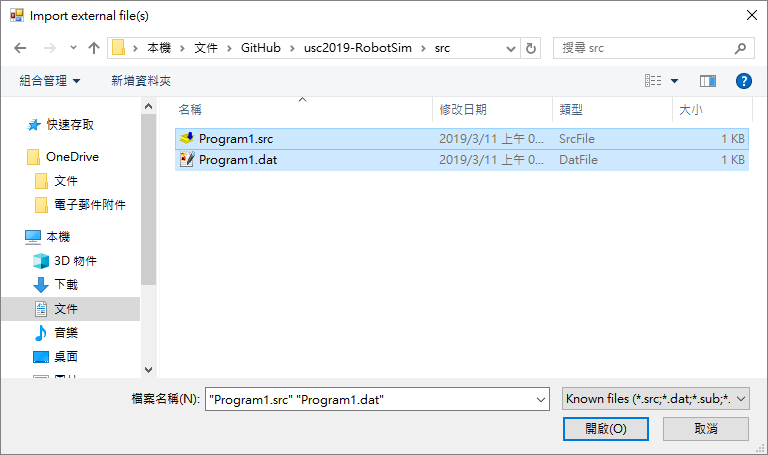
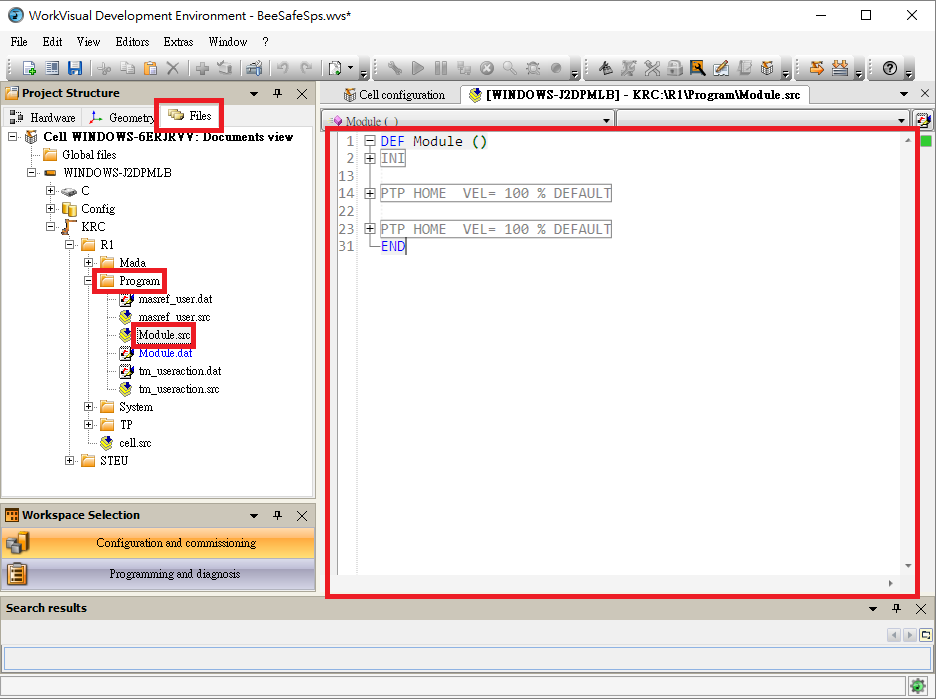
RobotSim export and import to WorkVisual Project
- WorkVisual project
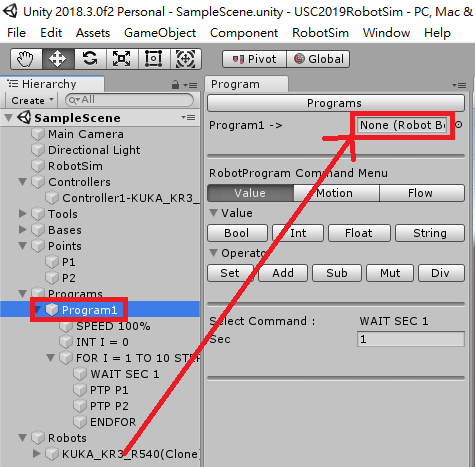
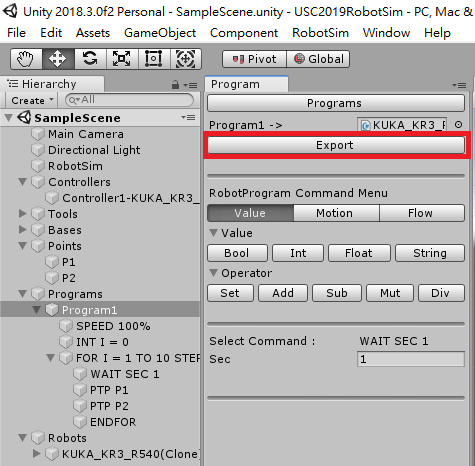
- RobotSim export code
- WorkVisual import